3 Functional description of the structure switches
3.9 Adaptation (S48)
Manual
114
SIPART DR21
C73000-B7476-C143-08
Controlled systems with compensation and periodic transients of 1st and 8th order with a
transient time T
95
of 5 s to 12 h can be identified. Dead time parts are permissible. In
S-controllers, the transient time T
95
should be double the actuating time max. (tP/tM).
The monitoring time tU serves to optimize the cancel criteria.
It can always be started with tU = off (dynamic system knowledge is unnecessary).
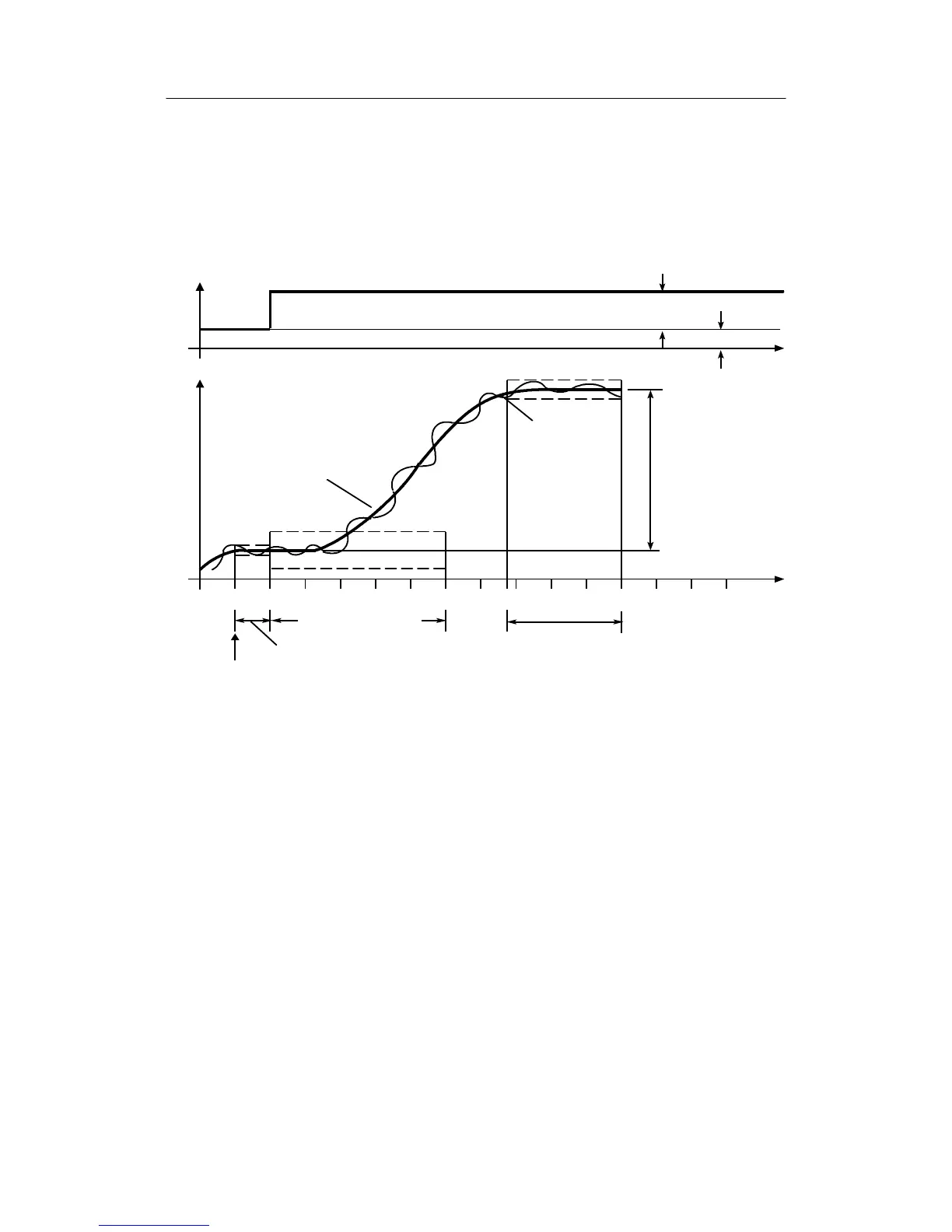
x
x measuring
process
x
M
Model curve x
M
y
100500-10
F(n,T)=min
tU
y
manual
Δy
Δx=ks⋅Δy
%tU
Full scale
ID
67 %
Start ID
ID fixed state
Start of adaptation
Figure 3-31 Time curve of an adaptation without error messages in which tU = 2× T95
Error checks are made during system identification in order to be able to prematurely abort
the identification. There are 12 control steps altogether which are displayed by flashing on
the digital x- and w-displays when errors occur. As soon as an error message appears, the
system identification is aborted and it must be restarted after correcting the presettings in
the parameterization mode AdAP if necessary. Acknowledgement of error messages, see
chapter 5.4.2, page 155 list of error messages, see table 5-3page 162.
D Controller design
The controller is designed according to the absolute value optimum method (S48=2). This
setting method is very robust and also allows variation of the line amplification. However, it
generates an overshoot of approx. 5 % in the event of changes in the command variables. If
this is undesirable, operation can also take place with the controller design without overshoot
(S48 = 1). Kp is reduced to 80% here.