3 Functional description of the structure switches
3.4 Controller types (S1, S42 to S45)
Manual
68
SIPART DR21
C73000-B7476-C143-08
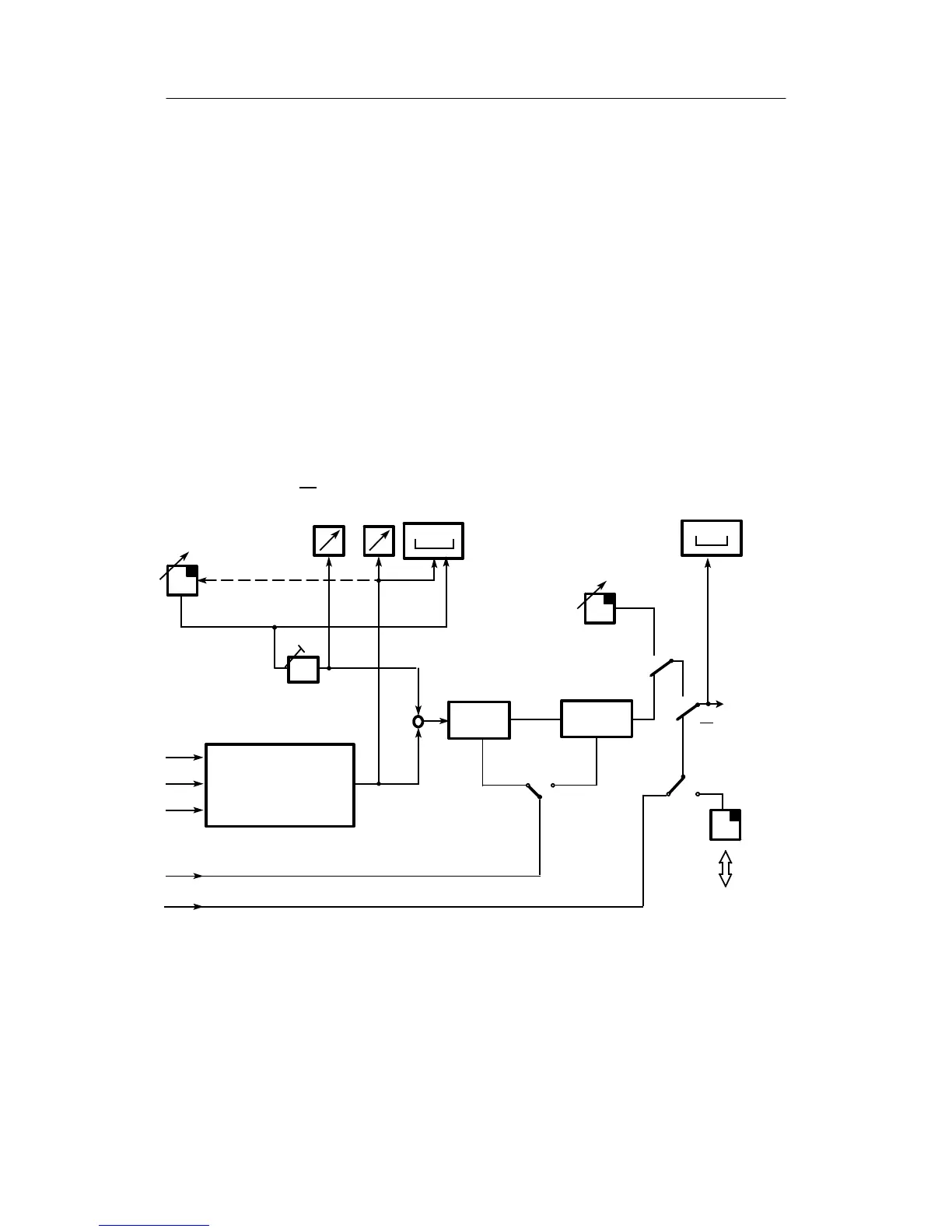
3.4.4 DDC-Fixed setpoint controller (S1 = 2)
The DDC-controller has the job of taking over the control circuit as bumpless as possible in the
case of a computer failure. During DDC operation- the process computer takes over the control
function, the computer is in stand-by-mode and is tracked to the computer manipulated vari-
able. If necessary the control difference is set to zero by x-tracking for absolutely bumpless
switching.
In K-controller circuits, the actuating current can be output parallel by the computer periphery to
achieve full redundancy. In this case the actuating current of the K-controller is switched off dur-
ing computer operation (S52 = 1). If the actuating current of the computer is also to be switched
off during controller operation, the two currents simply need to be added by OR-diodes. This
OR-diode is integrated in the current outputs of the SIPART-controllers.
If the U/I-converter of the K-controller is to be used during computer operation to feed the final
control element, the actuating current cutoff must be cancelled (S52 = 0).
The DDC-mode corresponds to tracking mode of the other controller types with the difference
that the switching to tracking mode takes place not via the control signal N but as a function of
the control signal CB and the Internal/External key:
DDC-mode ≙ RC = Int
∧CB = 1
Y
W
x3
x1
x2
PID
W
+
-
X
wi
x=x1+c1 · (x2 - c2 · x3+c3)
X
0000
y
a
+c6 · z
z
y
H
y
a
y
N
00
x - TRACKING
y
N
y
ES
SES
Int∧CB
tS
Figure 3-9 Control principle S1 = 2