2.5. Tool I/O
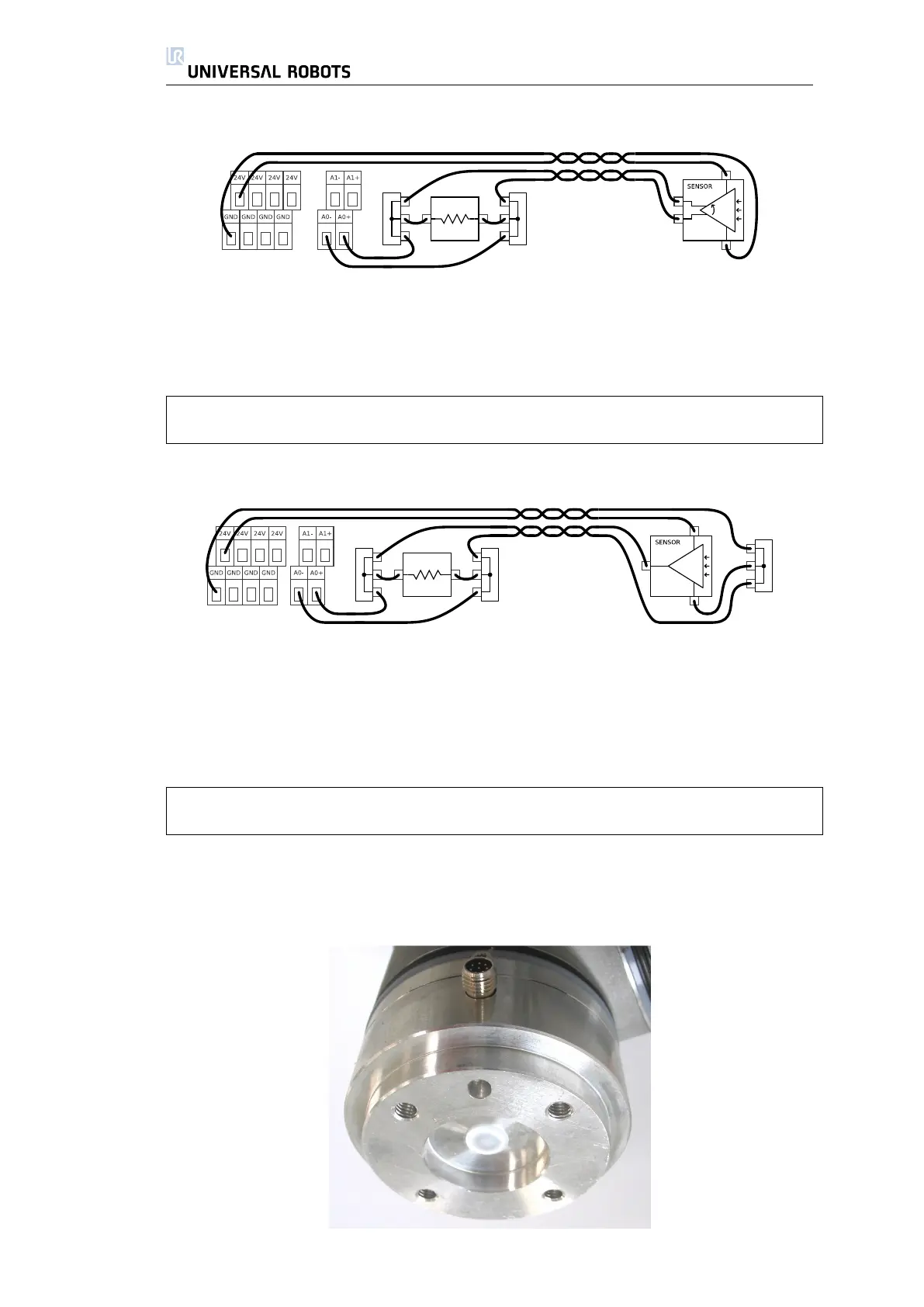
Using Analog Inputs, Differential Current Input
When longer cables are used, or if it is a very noisy environment, current
based signals are preferred. Also, some equipment comes only with a current
output. To use current as inputs, an external resistor is needed as shown above.
The value of the resistor would normally be around 200 ohms, and the best result
is accomplished when the resistor is close to the screw terminals of the controller.
Note that the tolerance of the resistor and the ohmic change due to tempera-
ture must be added to the error specifications of the analog inputs.
Using Analog Inputs, Non-differential Current Input
If the output of the equipment is a non-differential current signal, a resistor must
be used as shown above. The resistor should be around 200 ohms and the re-
lationship between the voltage at the controller input and the output of the
sensor is given by:
Voltage = Current x Resistance
Note that the tolerance of the resistor and the ohmic change due to tempera-
ture must be added to the error specifications of the analog inputs.
2.5 Tool I/O
At the tool end of the robot there is a small connector with eight connections.
28 UR-6-85-5-A

 Loading...
Loading...







