3.4. Programming
Example
Waypoint2
WaypointStart
movel
Waypoint1
if (digital_input[1]) then
else
endif
WaypointEnd1
WaypointEnd2
Program
Ending point 1
Starting point
Straight line segment
5 cm blend
Waypoint 1
Waypoint 2
10 cm blend
Ending point 2
Straight line segment
This is where the input
port is read!
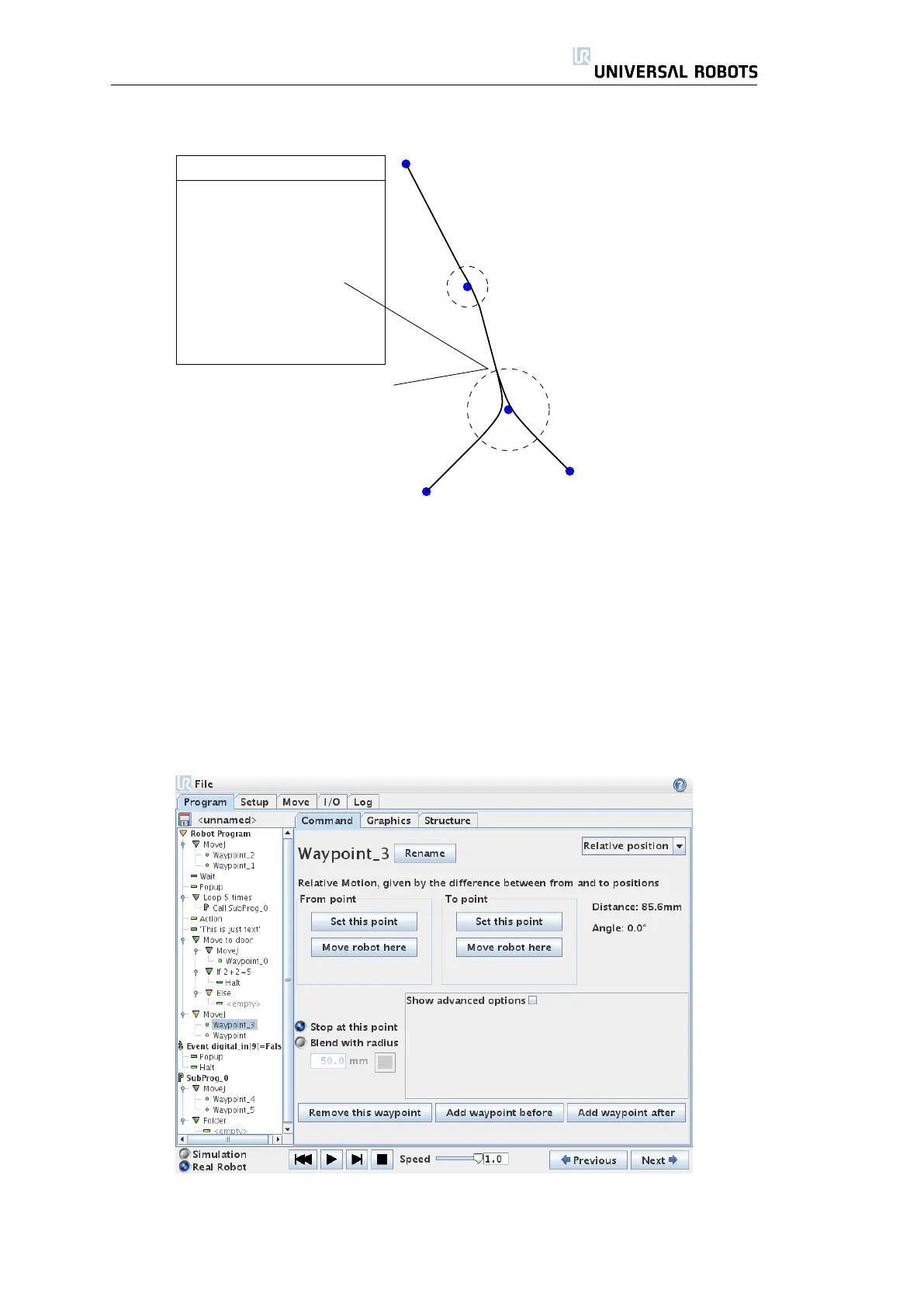
A small example in which a robot program moves the tool from a starting posi-
tion to one of two ending positions, depending on the state of digital_input[1].
Notice that the tool trajectory (thick black line) moves in straight lines outside the
blend areas (dashed circles), while the tool trajectory deviates from the straight
line path inside the blend areas. Also notice that the state of the digital_input[1]
sensor is read just as the robot is about to enter the blend area around Waypoint
2, even though the if...then command is after Waypoint 2 in the program
sequence. This is somewhat counter-intuitive, but is necessary to allow the robot
to select the right blend path.
3.4.6 Program → Command Tab, Relative Waypoint
A waypoint with the position given relative to the robot’s previous position,
such as “two centimeters to the left”. The relative position is defined as the
51 UR-6-85-5-A

 Loading...
Loading...







