3.3. Robot Control
3.3.5 Setup → TCP Position
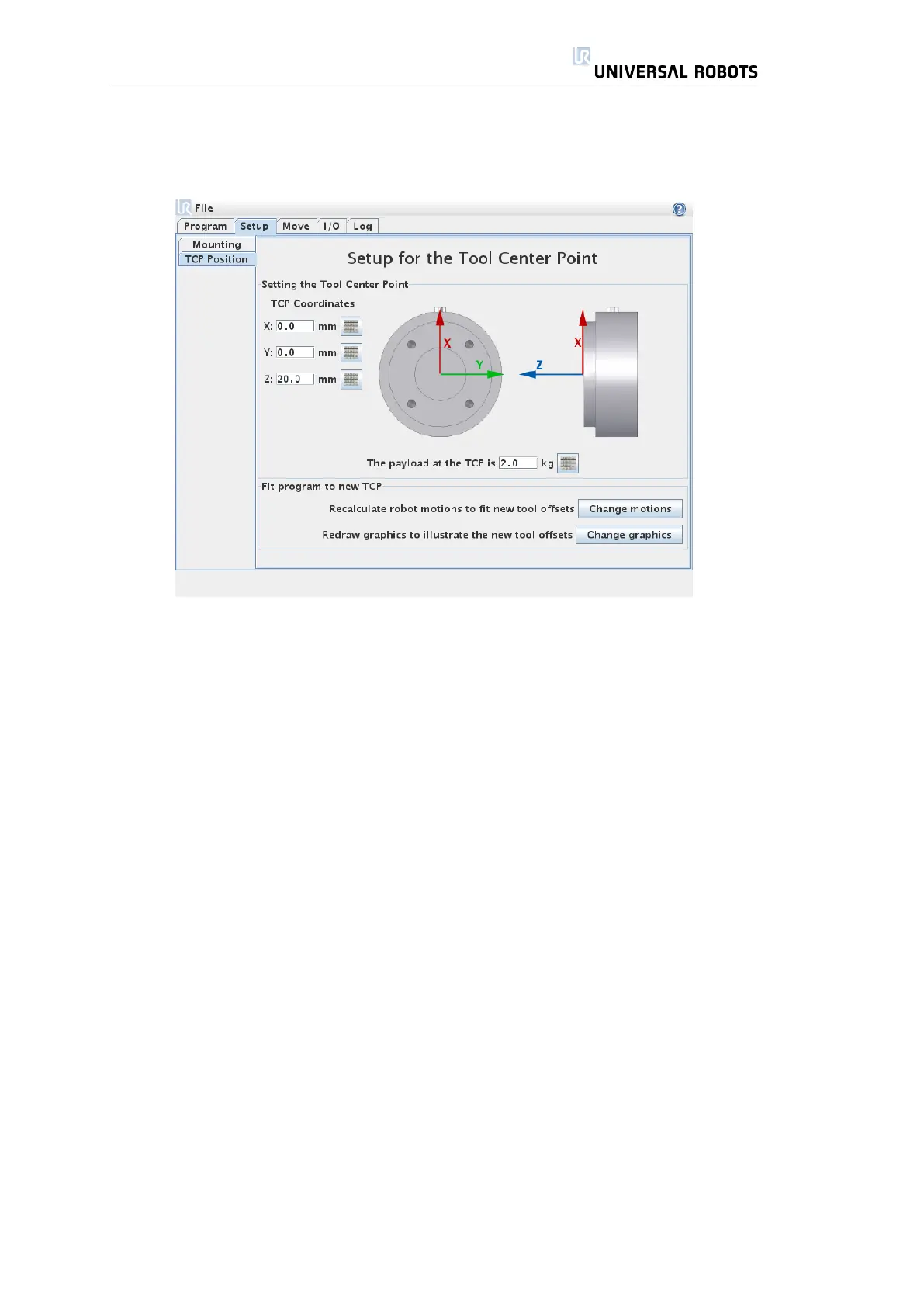
The Tool Center Point (TCP) is the characteristic point on the robot’s tool.
When the robot moves linearly, it is this point that moves in a straight line. It is
also the motion of the TCP that is visualized on the graphics tab. The TCP is given
relative to the center of the tool output flange, as indicated on the on-screen
graphics.
The two buttons on the bottom of the screen are relevant when the TCP is
changed.
• Change Motions recalculates all positions in the robot program to fit the
new TCP. This is relevant when the shape or size of the tools has been
changed.
• Change Graphics redraws the graphics of the program to fit the new TCP.
This is relevant when the TCP has been changed without any physical
changes to the tool.
43 UR-6-85-5-A

 Loading...
Loading...







