3.4. Programming
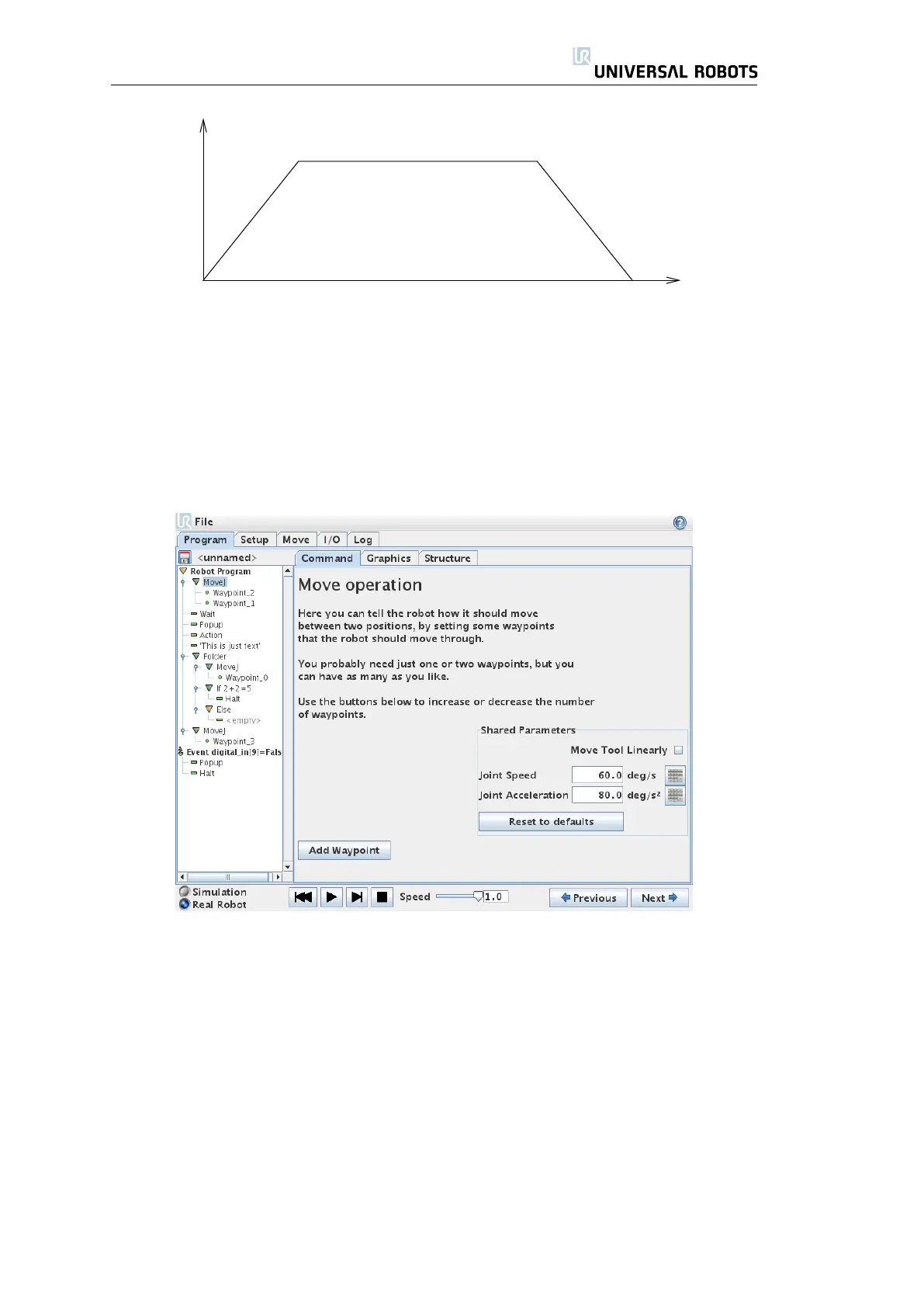
Time
Speed
Acceleration
Cruise
Deceleration
Figure 3.1: Speed profile for a motion. The curve is divided into three segments:
acceleration, cruise and deceleration. The level of the cruise phase is given by
the speed setting of the motion, while the steepness of the acceleration and
deceleration phases is given by the acceleration parameter.
3.4.4 Program → Command Tab, Move
The Move command controls the robot motion through the underlying way-
points. Waypoints have to be under a Move command. The Move command
defines the acceleration and the speed at which the robot is moving, and also
whether the motion is in joint space or linear space. In joint space each joint is
controlled to reach the desired end location at the same time, which results in
a curved path for the tool, whereas in linear space the joints perform a more
complicated motion to keep the tool on a straight line path. Generally, the
robot can move faster in joint space. In the program tree view, the command
will switch between movej and movel to display what type of motion is selected.
The settings of a Move command apply to the path from the robot’s current
position to the first waypoint under the command, and from there to each of
the following waypoints. The Move command settings do not apply to the path
going from the last waypoint under that Move command.
49 UR-6-85-5-A

 Loading...
Loading...







