3.4. Programming
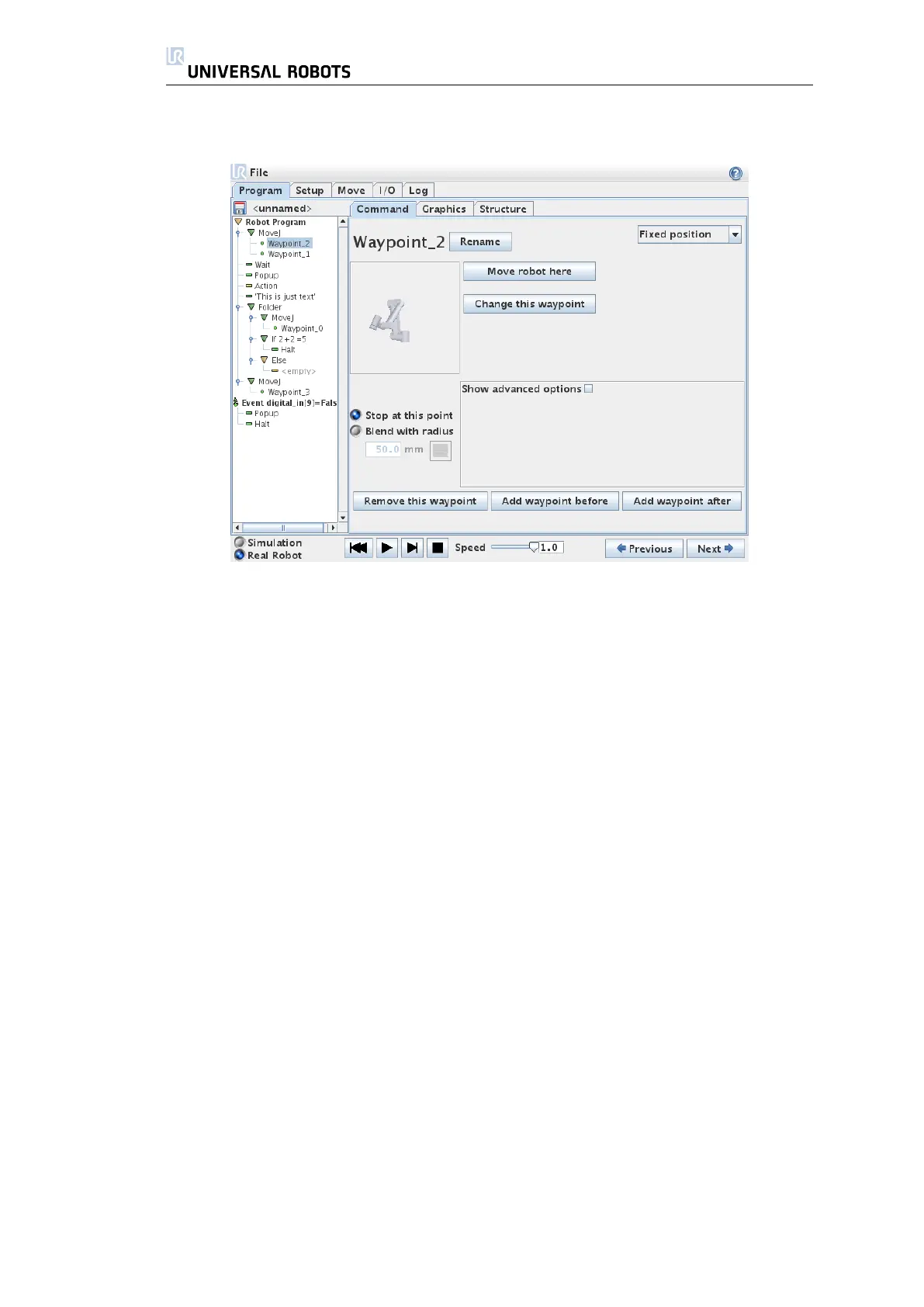
3.4.5 Program → Command Tab, Fixed Waypoint
A point on the robot path. Waypoints are the most central part of a robot
program, telling the robot where to be. A fixed position waypoint is given by
physically moving the robot to the position.
Waypoint names
Waypoint names can be changed. Two waypoints with the same name is al-
ways the same waypoint. Waypoints are numbered as they are specified.
Blend radius
If a blend radius is set, the robot trajectory blends around the waypoint, allowing
the robot not to stop at the point. Blends cannot overlap, so it is not possible
to set a blend radius that overlaps a blend radius for a previous or following
waypont. A stop point is a waypoint with a blend radius of 0.0mm.
Note on I/O Timing
If a waypoint is a stop point with an I/O command as the next command, the
I/O command is executed when the robot stops at the waypoint. However, if
the waypoint has a blend radius, the following I/O command is executed when
the robot enters the blend.
50 UR-6-85-5-A

 Loading...
Loading...






