3.4. Programming
difference between the two given positions (left to right). Note that repeated
relative positions can move the robot out of its workspace.
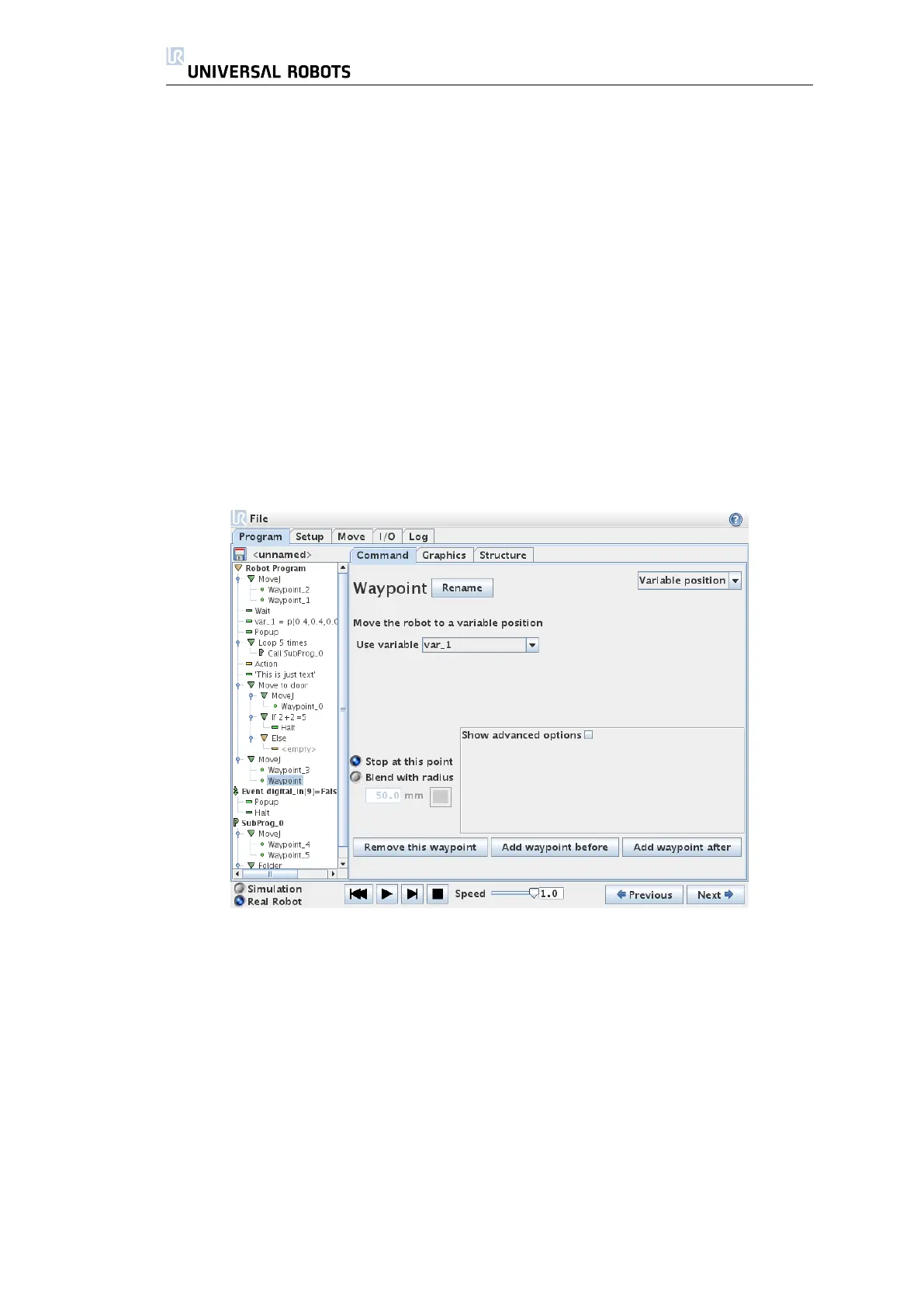
3.4.7 Program → Command Tab, Variable Waypoint
A waypoint with the position given by a variable, in this case calculated_pos.
The variable can be a list of joint angles in radians, such as given by the assign-
ment var=[0.1,0.4,0.2,2.0,2.1,-3.14], or a pose such as
var=p[0.5,0.0,0.0,3.14,0.0,0.0]. The first three are x,y,z and the last three
are the orientation given as an axis-angle given by the vector rx,ry,rz. The length
of the axis is the angle to be rotated in radians, and the vector itself gives the
axis about which to rotate.
52 UR-6-85-5-A

 Loading...
Loading...







