4.4 Trial Operation
4-25
4.4.3 Electronic Gear
The electronic gear enables the workpiece travel distance per reference unit input from the host controller. The
minimum unit of the position data moving a load is called a reference unit.
(1) Electronic Gear Ratio
Set the electronic gear ratio using Pn20E and Pn210.
If the gear ratio of the servomotor and the load shaft is given as n/m where m is the rotation of the servomotor
and n is the rotation of the load shaft,
When the Electronic Gear is Not Used:
Calculate the revolutions.
1 revolution is 6 mm. Therefore, 10 ÷ 6 = 10/6 revolutions.
When the Electronic Gear is Used:
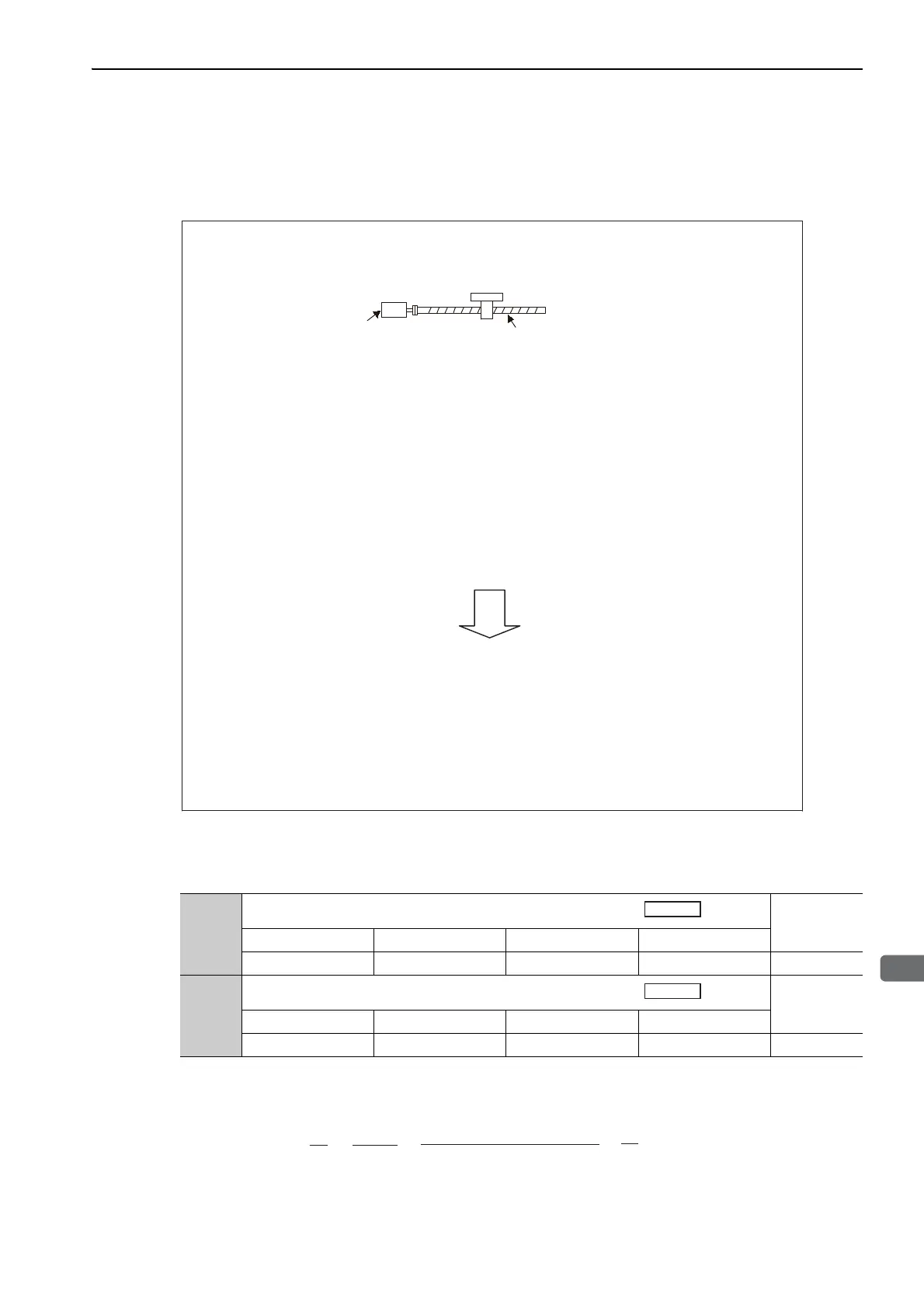
Ball screw pitch: 6 mm
Workpiece
Encoder resolution (20 bit) 1048576
The section indicates the difference between using and not using an electronic gear when a
workpiece is moved 10 mm in the following configuration.
Calculate the required reference units.
1048576 reference units is 1 revolution. Therefore, 10/6 × 1048576 = 1747626.66 reference units.
Input 1747627 references as reference units.
Reference units must be calculated per reference. → complicated
The reference unit is 1 μm. Therefore, to move the workpiece 10 mm (10000 μm),
1 reference unit = 1 μm, so 10000 1 = 10000 reference units.
Input 10000 reference units.
Calculation of reference units per reference is not required. → simplified
Pn20E
Electronic Gear Ratio (Numerator)
Classification
Setting Range Setting Unit Factory Setting When Enabled
1 to 1073741824 1 4 After restart Setup
Pn210
Electronic Gear Ratio (Denominator)
Classification
Setting Range Setting Unit Factory Setting When Enabled
1 to 1073741824 1 1 After restart Setup
Electronic gear ratio:
=
A
B
Pn210
Pn20E
=
n
m
Encoder resolution
Travel distance per load
shaft revolution (reference units)
×