5 Adjustments
5.3.2 Advanced Autotuning Procedure
5-20
5.3.2 Advanced Autotuning Procedure
The following procedure is used for advanced autotuning.
Advanced autotuning is performed from the digital operator (option) or SigmaWin+.
The operating procedure from the digital operator is described here.
Refer to the
Σ
-V Series User’s Manual, Operation of Digital Operator (No.: SIEP S800000 55) for basic key
operations of the digital operator.
(1) Operating Procedure
CAUTION
• When using the SERVOPACK with Jcalc = OFF (moment of inertia is not calculated), be sure to set a suit-
able value for the moment of inertia ratio (Pn103). If the setting greatly differs from the actual moment of
inertia ratio, normal control of the SERVOPACK may not be possible, and vibration may result.
• When using the MP2000 Series with phase control, select the mode = 1 (standard level). If 2 or 3 is
selected, phase control of the MP2000 Series may not be possible.
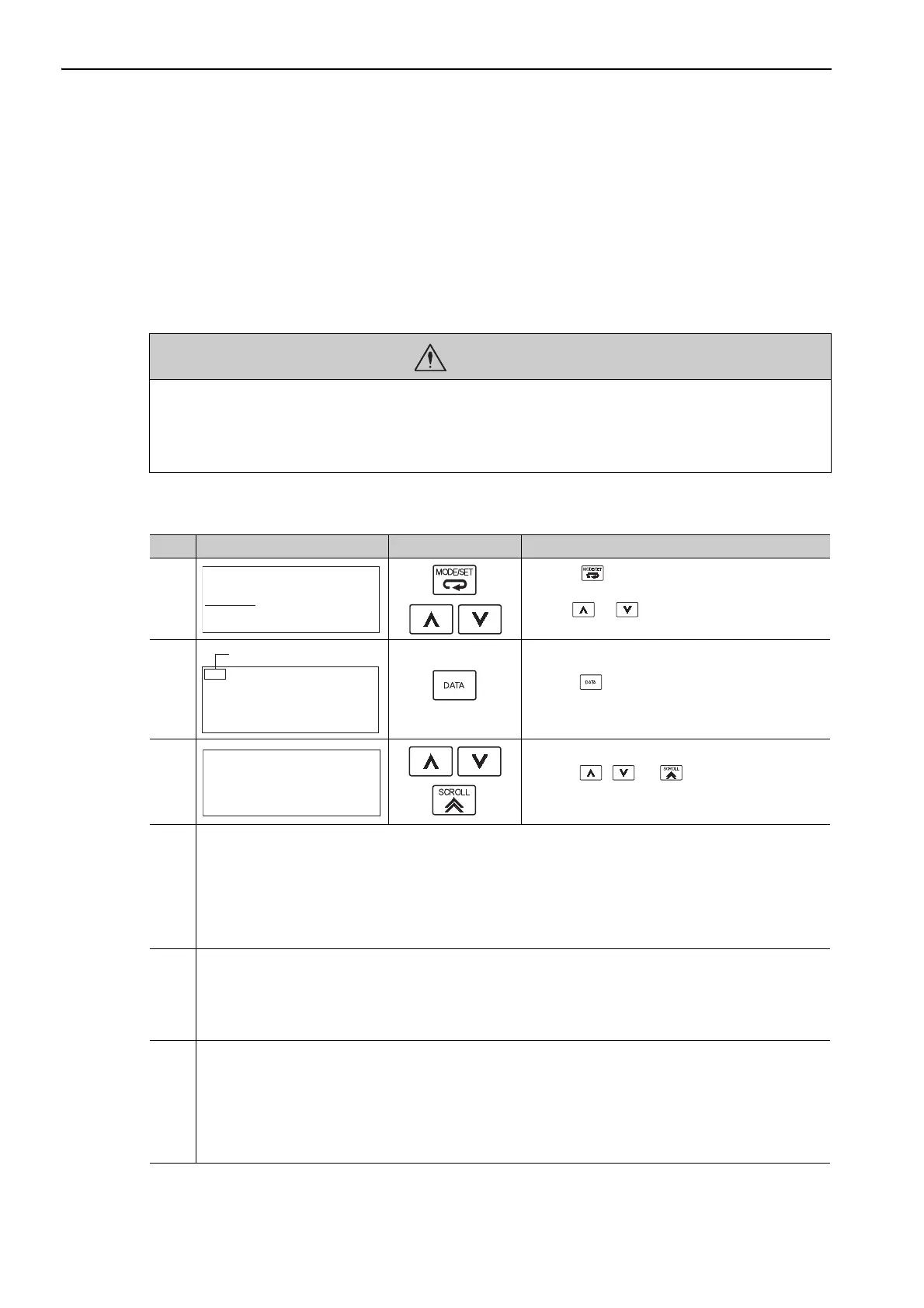
Step Display after Operation Keys Operation
1
Press the Key to view the main menu for the
utility function.
Use the or Key to move through the list,
select Fn201.
2
Press the Key to display the initial setting screen
for F201 (Advanced Autotuning).
3
Press the , , or Key and set the items in
steps 3-1 to 3-4.
3-1
Calculating Moment of Inertia
Select the mode to be used.
Usually, set Jcalc to ON.
Jcalc = ON: Moment of inertia calculated [Factory setting]
Jcalc = OFF: Moment of inertia not calculated
Note: If the moment of inertia ratio is already known from the machine specifications, set the value in Pn103
and set Jcalc to OFF.
3-2
Mode Selection
Select the mode.
Mode = 1: Makes adjustments considering response characteristics and stability (Standard level).
Mode = 2: Makes adjustments for positioning [Factory setting].
Mode = 3: Makes adjustments for positioning, giving priority to overshooting suppression.
3-3
Type Selection
Select the type according to the machine element to be driven. If there is noise or the gain does not increase, bet-
ter results may be obtained by changing the rigidity type.
Type = 1: For belt drive mechanisms
Type = 2: For ball screw drive mechanisms [Factory setting]
Type = 3: For rigid systems in which the servomotor is directly coupled to the machine (without gear or other
transmissions)
㧮㧮ޓ㧲㨁㧺㧯㨀㧵㧻㧺
㧲㨚㧞㧜㧜㧦㨀㨡㨚㨑㧸㨢㨘ޓ㧿㨑㨠
㧲㨚㧞㧜㧝㧦㧭㧭㨀
㧲㨚㧞㧜㧞㧦㧾㨑㨒㧭㧭㨀
㧲㨚㧞㧜㧟㧦㧻㨚㨑㧼㨞㨙㨀㨡㨚
㧮㧮㧭㨐㨢㨍㨚㨏㨑㨐ޓ㧭㨀
ޓ㧶㨏㨍㨘㨏㧩㧻㧺
ޓ㧹 㨛 㨐 㨑㧩㧞ޓ㨀㨥㨜㨑㧩㧞
ޓ㧿㨠㨞㨛㨗㨑㧩㧗㧜㧜㧤㧜㧜㧜㧜㧜
ޓޓޓޓޓޓ㧔㧜㧜㧜㧟㧚㧜㧕㨞㨑㨢
Status Display
㧮㧮㧭㨐㨢㨍㨚㨏㨑㨐ޓ㧭㨀
ޓ㧶㨏㨍㨘㨏㧩㧻㧺
ޓ㧹 㨛 㨐 㨑㧩㧞ޓ㨀㨥㨜㨑㧩㧞
ޓ㧿㨠㨞㨛㨗㨑㧩㧗㧜㧜㧤㧜㧜㧜㧜㧜
ޓޓޓޓޓޓ㧔㧜㧜㧜㧟㧚㧜㧕㨞㨑㨢