4.5 Test Without Motor Function
4-29
4.5 Test Without Motor Function
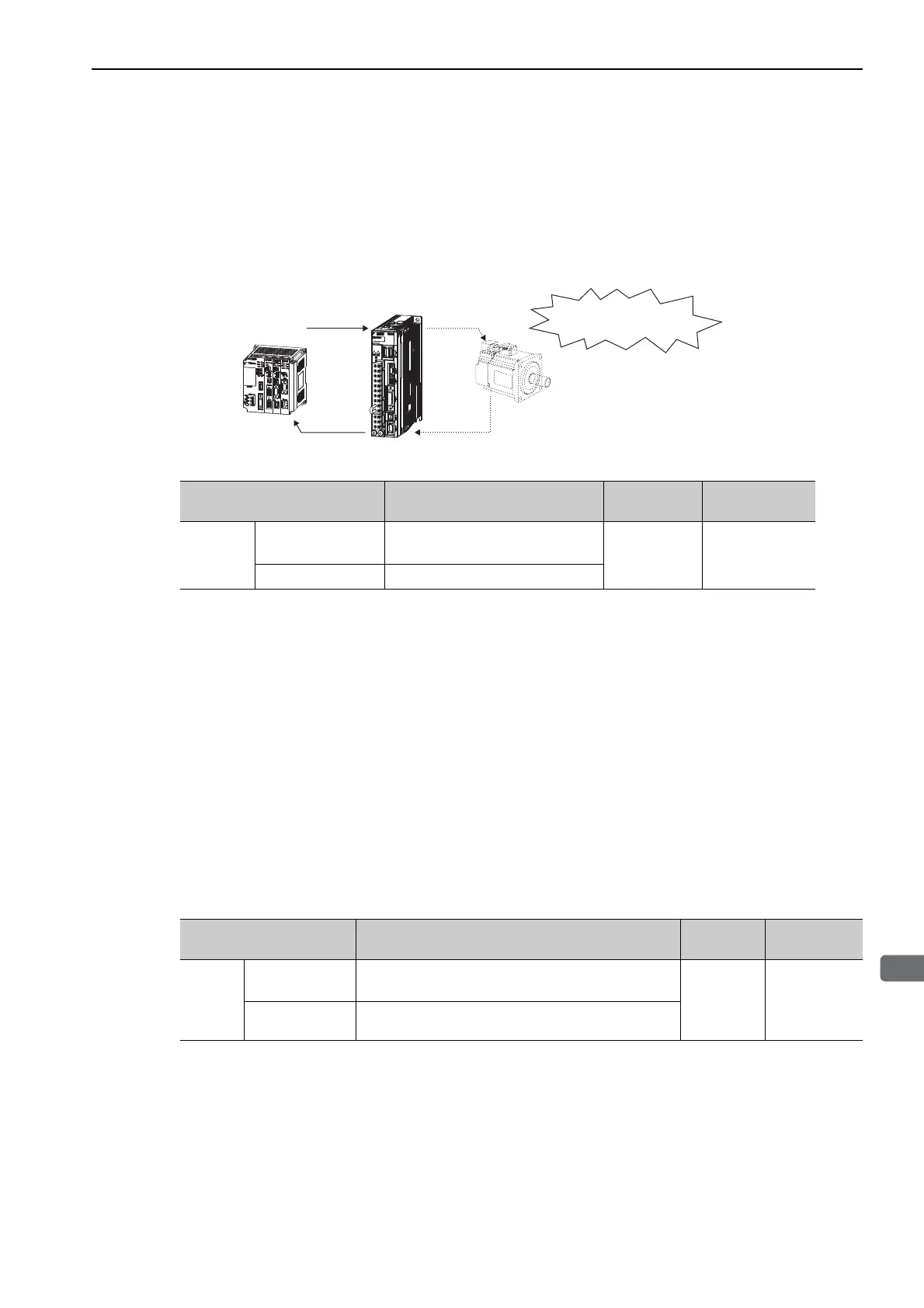
The test without a motor is used to check operation of the host controller and peripheral devices by simulating
the operation of the servomotor in the SERVOPACK without actually operating the servomotor. This test
enables you to check wiring, verify the system while debugging, and verify parameters. This shortens the time
required for setup work and prevents damage to the machine that may result from possible malfunctions. This
test can check the operation of the servomotor regardless of whether or not it is actually connected.
Use Pn00C.0 to enable or disable the test without a motor.
4.5.1 Motor Information
The motor information that is used for a test without a motor is given below.
(1) When Motor is Connected
If a motor is connected, the information from the connected motor is used for the motor and encoder scale
information. The set values of Pn00C.1 and Pn00C.2 are not used.
(2) When Motor is Not Connected
The information for the virtual motor that is stored in the SERVOPACK is used. The set values of Pn00C.1
and Pn00C.2 are used for the encoder information.
Encoder Resolution
The encoder information for the motor is set in Pn00C.1. The setting of Pn00C.1 is not used for an external
encoder with fully-closed loop control.
Encoder Type
The encoder information for the motor is set in Pn00C.2. An external encoder with fully-closed loop control is
Parameter Meaning
When
Enabled
Classification
Pn00C
n.0
[Factory setting]
Disables the test without a motor.
After restart Setup
n.1
Enables the test without a motor.
Reference Reference
ResponseResponse
Host controller
SERVOPACK
Simulates the operation
without motor.
Parameter Meaning
When
Enabled
Classification
Pn00C
n.0
[Factory setting]
Sets the encoder resolution for the test without a motor
to 13 bits.
After restart Setup
n.1
Sets the encoder resolution for the test without a motor
to 20 bits.