iii
About this Manual
This manual describes information required for designing, testing, adjusting, and maintaining Σ-V Series
SERVOPACKs.
Keep this manual in a location where it can be accessed for reference whenever required. Manuals outlined on
the following page must also be used as required by the application.
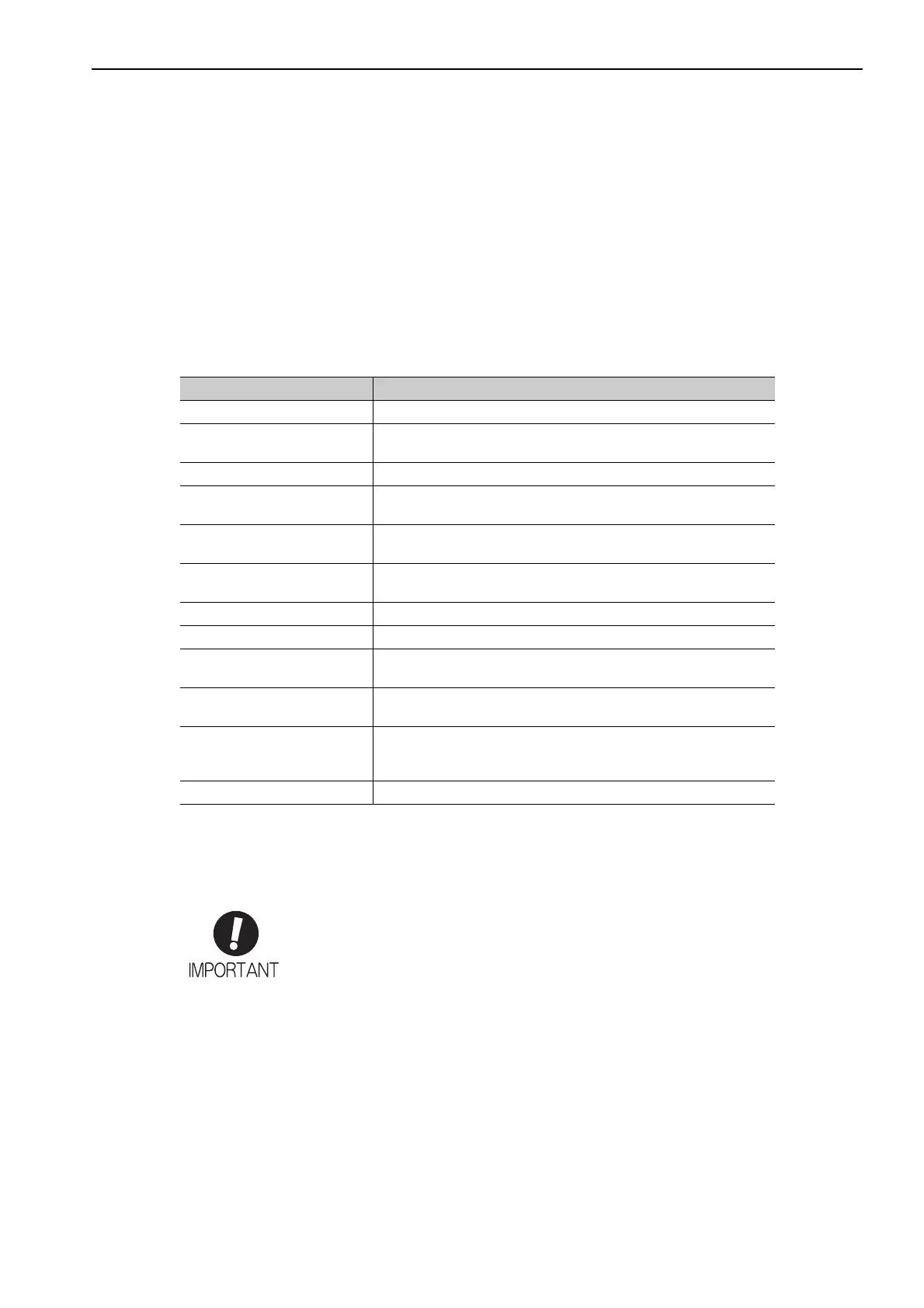
Description of Technical Terms
The following table shows the meanings of terms used in this manual.
IMPORTANT Explanations
The following icon is displayed for explanations requiring special attention.
Term Meaning
Cursor Input position indicated by Digital Operator
Servomotor
Σ-V Series SGMJV, SGMAV, SGMPS, SGMGV, SGMSV, or SGMCS
(Direct Drive) servomotor
SERVOPACK Σ-V Series SGDV servo amplifier
Servo Drive
A set including a servomotor and SERVOPACK (i.e., a servo ampli-
fier)
Servo System
A servo control system that includes the combination of a servo drive
with a host controller and peripheral devices
M-II Model
MECHATROLINK-II communications reference used for SERVO-
PACK interface
Servo ON Power to motor ON
Servo OFF Power to motor OFF
Base Block (BB)
Power supply to motor is turned OFF by shutting off the base current
to the power transistor in the current SERVOPACK.
Servo Lock
A state in which the motor is stopped and is in position loop with a
position reference of 0.
Main Circuit Cable
Cables which connect to the main circuit terminals, including main
circuit power supply cables, control power supply cables, servomotor
main circuit cables, and others.
Zero-speed Stopping Stopping the servomotor by setting the speed reference to 0
• Indicates important information that should be memorized, as well as precautions, such as
alarm displays, that do not involve potential damage to equipment.