Program features 163
The function operates on a 2 ms time level
Note: The jogging is not operational when the drive start command is on.
Note: The jogging speed overrides the constant speeds.
Note: The jogging uses ramp stop even if parameter 2102 STOP FUNCTION
selection is COAST.
Note: The ramp shape time is set to zero during the jogging (ie, linear ramp).
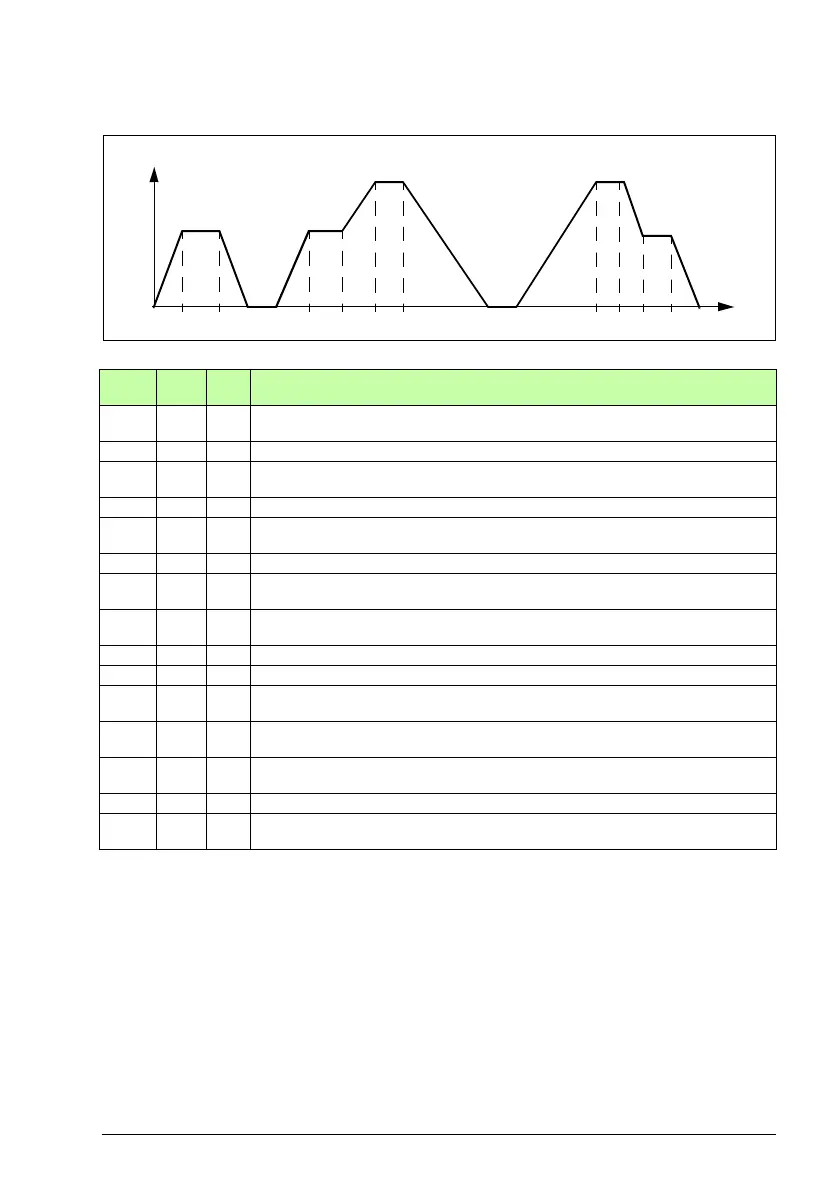
Jogging function uses constant speed 7 as jogging speed and
acceleration/deceleration ramp pair 2.
Phase Jog
cmd
Start
cmd
Description
1-2 1 0 Drive accelerates to the jogging speed along the acceleration ramp of the
jogging function.
2-3 1 0 Drive runs at the jogging speed.
3-4 0 0 Drive decelerates to zero speed along the deceleration ramp of the
jogging function.
4-5 0 0 Drive is stopped.
5-6 1 0 Drive accelerates to the jogging speed along the acceleration ramp of the
jogging function.
6-7 1 0 Drive runs at the jogging speed.
7-8 x 1 Normal operation overrides the jogging. Drive accelerates to the speed
reference along the active acceleration ramp.
8-9 x 1 Normal operation overrides the jogging. Drive follows the speed
reference.
9-10 0 0 Drive decelerates to zero speed along the active deceleration ramp.
10-11 0 0 Drive is stopped.
11-12 x 1 Normal operation overrides the jogging. Drive accelerates to the speed
reference along the active acceleration ramp.
12-13 x 1 Normal operation overrides the jogging. Drive follows the speed
reference.
13-14 1 0 Drive decelerates to the jogging speed along the deceleration ramp of the
jogging function.
14-15 1 0 Drive runs at the jogging speed.
15-16 0 0 Drive decelerates to zero speed along the deceleration ramp of the
jogging function.
x = state can be either 1 or 0
t
12 345 6 7 89 1011 1213
14
15
16
Speed

 Loading...
Loading...











