5 Calibration, M2000
5.1.1 How to calibrate the robot system
100 3HAC021111-001 Revision: B
5.1: Overview
5.1.1 How to calibrate the robot system
General This section provides an overview of the procedures to perform when calibrating the robot
system. Many of the steps in this overview are detailed in other sections to which references
are given.
Method -Wyler
Calibration
The calibration procedure with Wyler equipment may be performed with either one or two
sensors. The procedure detailed here is performed with only one sensor and may be described
as checking an pre-adjusted sensor, trying to obtain the same measurement value on every
axis as when adjusted at the reference plane.
All article numbers of relevant equipment are specified in their instructions respectively.
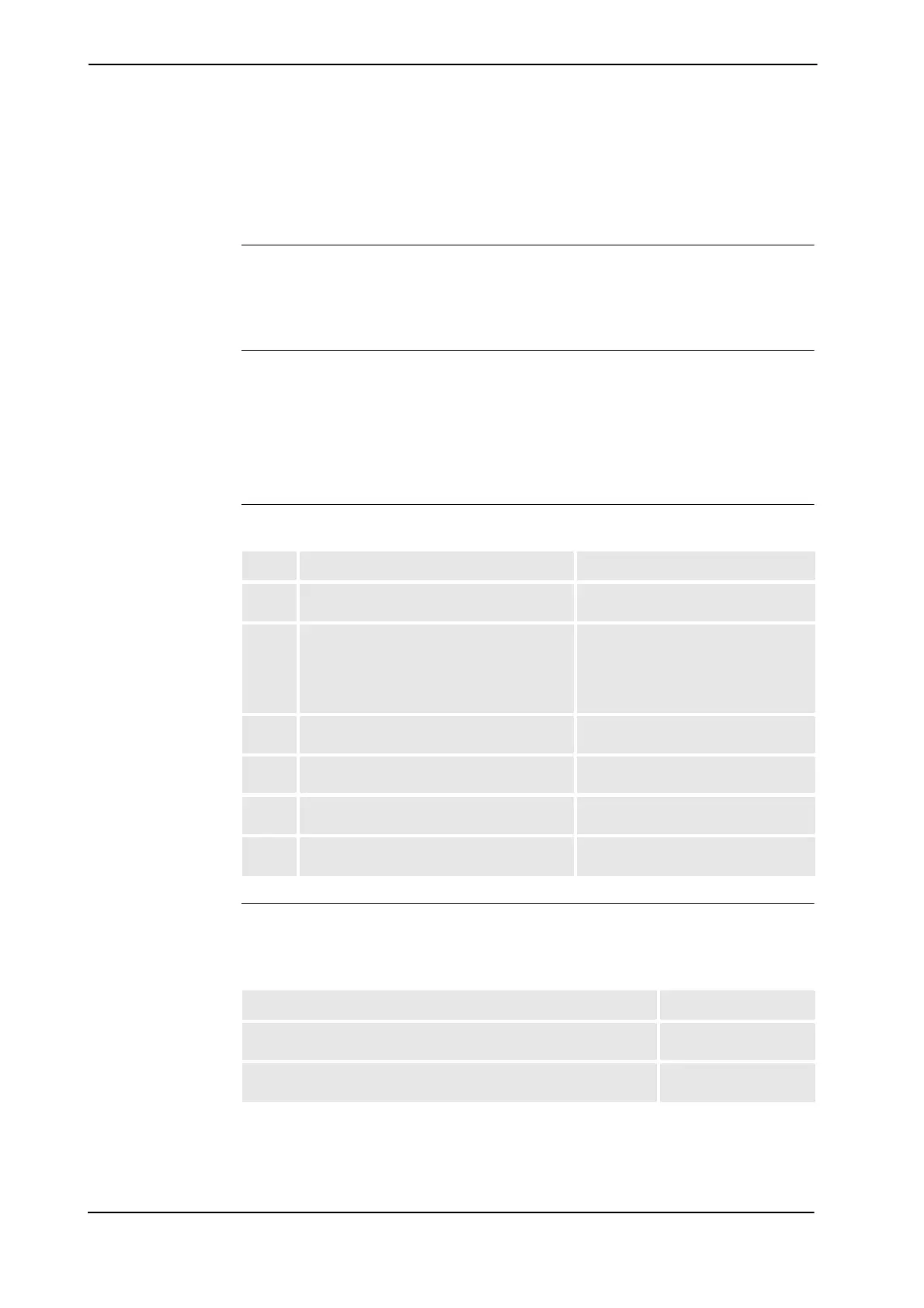
Overview,
calibration
Additional
information
In addition to the basic calibration procedure detailed above, a number of calibration related
actions may be performed:
Step Action Note
1. Check that all required hardware is avail-
able for calibrating the robot.
Required hardware is specified in the
calibrating procedures for each axis.
2. Manually run the robot axes to a position
close to the correct calibration position.
Use the calibration scales fitted to
each robot axis to locate this position.
These are shown in the section Cali-
bration scales and correct axis posi-
tion on page 102.
3. Initialize the Levelmeter. Detailed in section Initialization of
Levelmeter 2000 on page 108.
4. Start the calibration procedure on the TPU. Detailed in section Fine calibration
procedure on TPU on page 122.
5. Calibrate each axis. Detailed in each axis' calibration
instruction.
6. Verify that the calibration was successfully
carried out.
Detailed in section Post calibration
procedure on page 129.
Action Detailed in section:
How to update the robot revolution counter without performing a
complete calibration.
Updating the revolution
counters on page 127
How to manually check the current calibration position. Checking the calibration
position on page 105