5 Calibration, M2000
5.3.9 Updating the revolution counters
3HAC021111-001 Revision: B 127
5.3.9 Updating the revolution counters
Manually running
the manipulator
to the calibration
position
This section details the first step when updating the revolution counter; manually running the
manipulator to the calibration position.
Storing the
revolution
counter setting
This section details the second step when updating the revolution counter; storing the revolu-
tion counter setting.
CAUTION!
If a revolution counter is incorrectly updated, it will cause incorrect robot positioning, which
in turn may cause damage or injury!
Check the calibration very carefully after each update!
Step Action Illustration
1. Select axis-by-axis motion mode.
2. Press the enabling device on the teach pendant
and, using the joystick, move the robot manually
so that the calibration marks lie within the toler-
ance zone.
Shown in section Calibration
scales and correct axis position
on page 102.
3. Note that axis 6 does not have any mechanical
stop and can thus be calibrated at the wrong
faceplate revolution. Do not operate axis 6 man-
ually before the robot has been calibrated.
4. When all axes are positioned as above, store the
revolution counter settings using the Teach Pen-
dant Unit as detailed below:
Step Action Illustration
1. Press the button "Miscella-
neous".
xx0100000194
2. Select the Service win-
dow by pressing ENTER.
xx0100000200
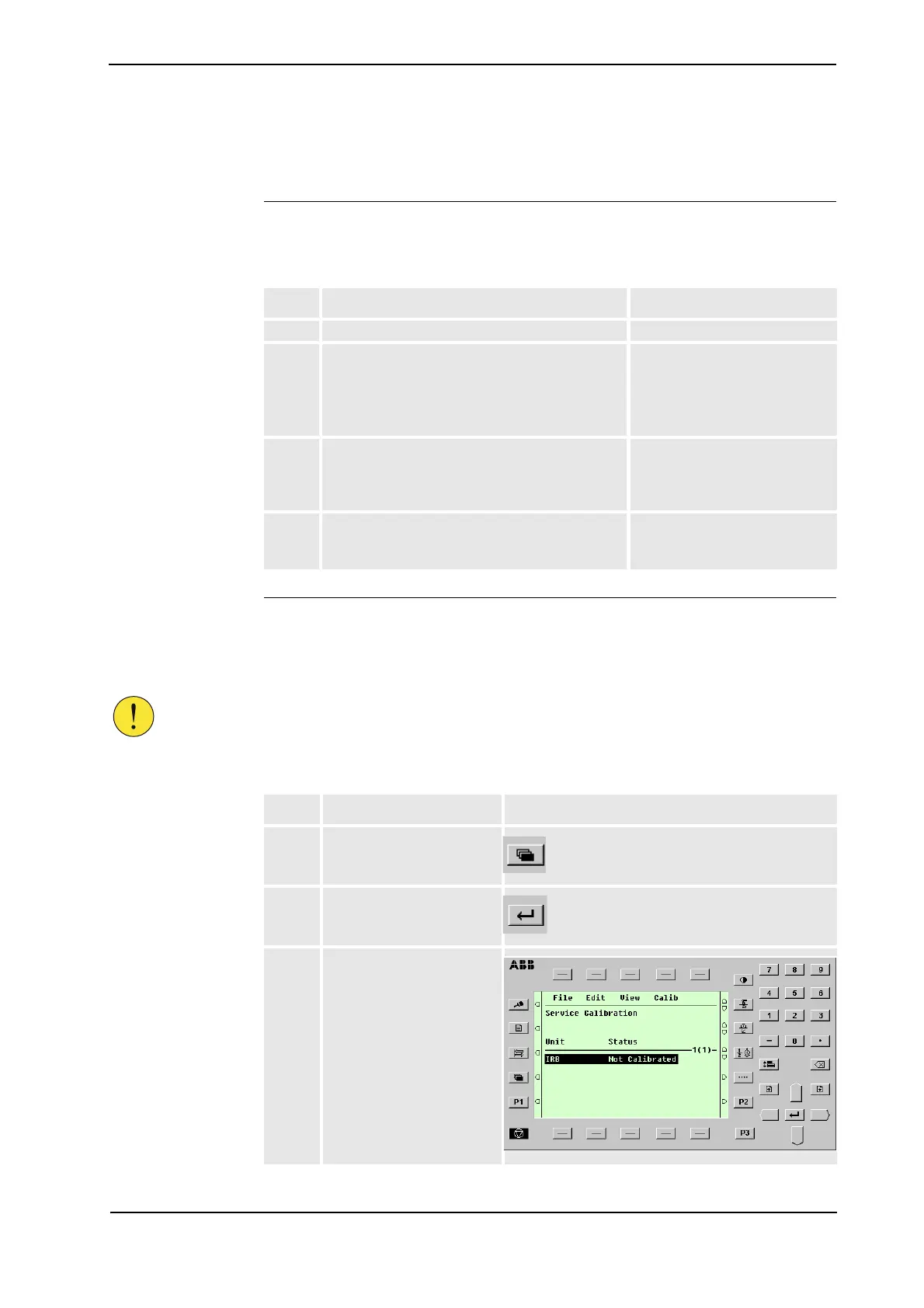
3. Select Calibration from
the View menu.
The Calibration window
appears.
If there is more than one unit
connected to the robot, they
will be listed in the window.
xx0100000201