2 Installation and commissioning
2.1.5 Stress Forces
3HAC021111-001 Revision: B 39
2.1.5 Stress Forces
Stiffness The stiffness of the foundation must be designed to minimize the influence on the dynamic
behaviour of the robot.
TuneServo can be used for adapting the robot tuning to a non-optimal foundation.
IRB 1400 and IRB
1400H
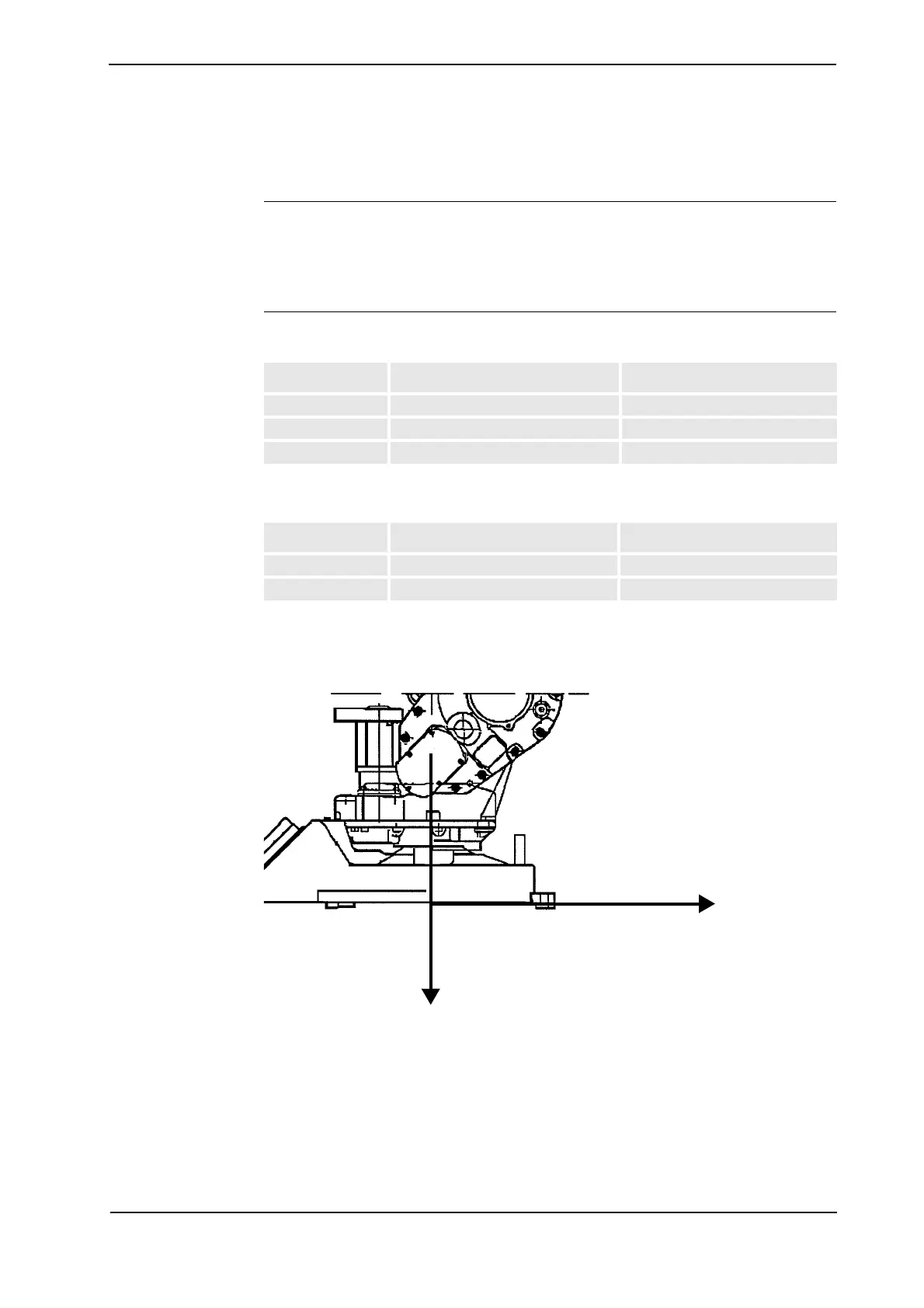
Fxy and Mxy are vectors that can have any direction in the xy plane.
The Directions of the Stress Forces.
Force Endurance load (in operation) Max. load (emergency stop)
Fxy ± 1500 N ± 2000 N
Fz (upright) 2800 ± 500 N 2800 ± 700 N
Fz (suspended) -2800 ± 800 N -2800 ± 1000 N
Torque Endurance load (in operation) Max. load (emergency stop)
Mxy ± 1800 Nm ± 2000 Nm
Mz ± 400 Nm ± 500 Nm
X
Z