7 Alternative calibration
7.0.2 Alternative calibrating
142 3HAC021111-001 Revision: B
7.0.2 Alternative calibrating
General The manipulator may be calibrated in any of three positions, shown in Alternative calibration
position on page 127.
Procedure
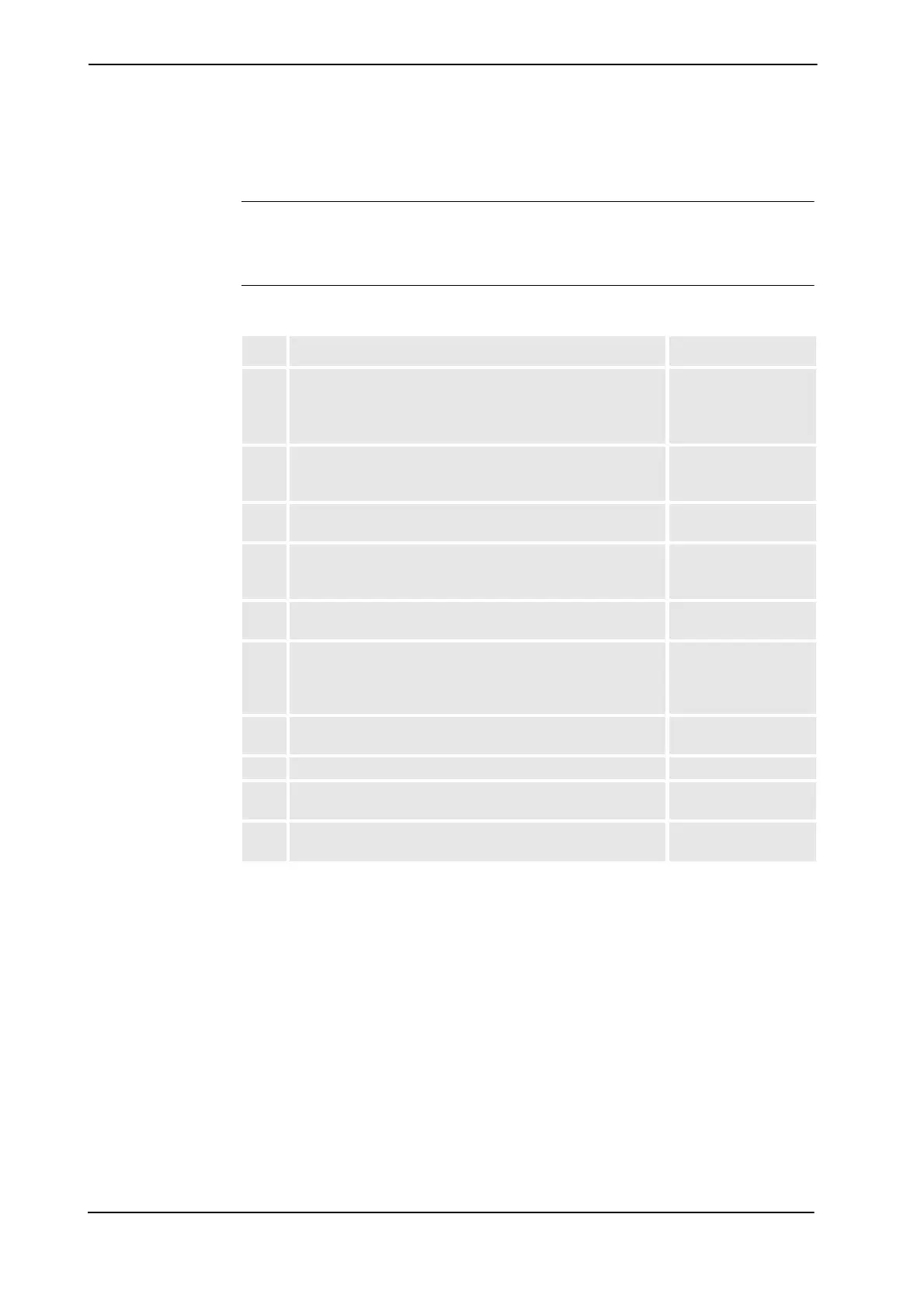
Step Action Illustration
1.
Calibrate the robot in position 0 for all axes.
Set an alternative calibration position before installation if the
final installation makes it impossible to reach the calibration
0 position.
2.
Run the calibration program CALxxx in the system\SYS-
TEM\UTILITY\SERVICE\CALIBRAT\. (xxx = robot version,
e.g. CAL1400)
3.
Select Normal position, and check the calibration marks for
each axis.
4.
Run the calibration program again and select the desired cal-
ibration position (Hanging) as shown in Alternative calibra-
tion position on page 127.
5.
Change to the new calibration offset, as detailed in New cal-
ibration offset on page 130.
6.
Note the new calibration offset on the label, located under the
flange plate on the base.The new calibration offset values
can be found as detailed in Retrieving offset values on page
131.
7.
Change to the new calibration position as detailed in New
calibration position on page 129.
8.
Restart the robot by selecting Restart from the File menu.
9.
Mark the new calibration positions for axes 2 and 3, with the
punch marker.
10.
The system parameters will be saved to the storage memory
at power off.