Using the Brake Release Button
Adept Cobra s600/s800 Robot User’s Guide, Rev H 55
For more information on status codes, go to the Adept Document Library on the Adept
website, and in the Procedures, FAQs, and Troubleshooting section, look for the Adept
Status Code Summary document.
5.3 Using the Brake Release Button
Brakes
The robot has a braking system which decelerates the robot in an emergency condition,
such as when the emergency stop circuit is open or a robot joint passes its softstop.
Instructions on configuring the Programmable E-Stop delay can be found within the SPEC
section of the Instructions for Adept Utility Programs manual. The default setting is
correct for most applications.
The braking system will not prevent you from moving the robot manually once the robot
has stopped (and High Power has been removed).
In addition, Joint 3 has an electromechanical brake. The brake is released when High
Power is enabled. When High Power is turned off, the brake engages and holds the
position of Joint 3.
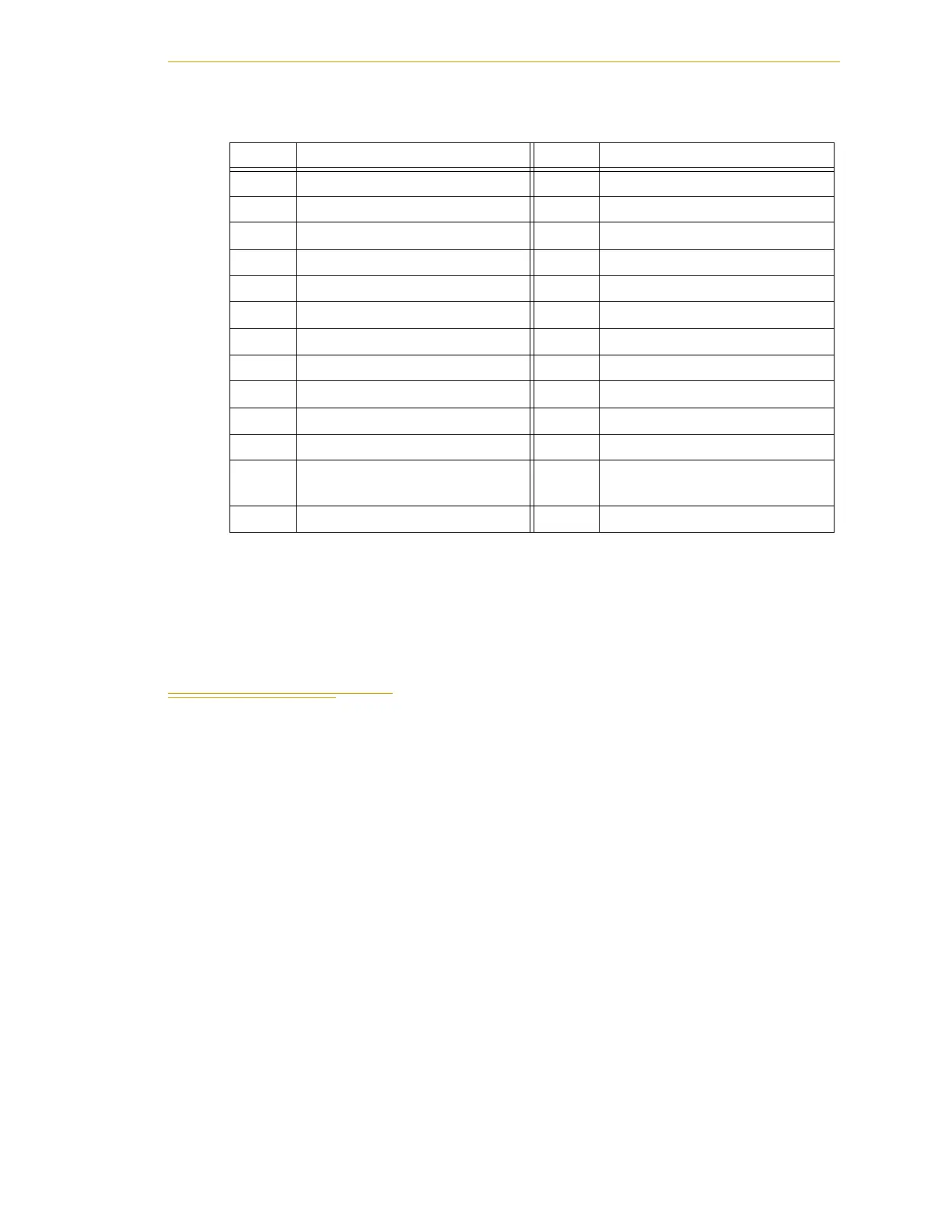
Table 5-3. Status Panel Codes
LED Status Code LED Status Code
OK No Fault h# High Temp Amp (Joint #)
ON High Power ON Status H# High Temp Encoder (Joint #)
MA Manual Mode hV High Voltage Bus Fault
24 24 V Supply Fault I# Initialization Stage (Step #)
A# Amp Fault (Joint #) M# Motor Stalled (Joint #)
B# IO Blox Fault (Address #) NV Non-Volatile Memory
AC AC Power Fault P# Power System Fault (Code #)
D# Duty Cycle Exceeded (Joint #) PR Processor Overloaded
E# Encoder Fault (Joint #) RC RSC Fault
ES E-Stop SW Watchdog Timeout
F# External Sensor Stop S# Safety System Fault (Code #)
FM Firmware Mismatch T# Safety System Fault
(Code 10 + #)
FW 1394 Fault V# Hard Envelope Error (Joint #)
 Loading...
Loading...

