110 DG14 and DG16 Board & Sensor Reference Manual
A time step, or leap second, was added to UTC on 12-31-98. GPS time was not physically adjusted,
and is now thirteen seconds ahead of UTC. The time change is reflected in the navigation messages
generated by the individual satellites as of January 1, 1999.
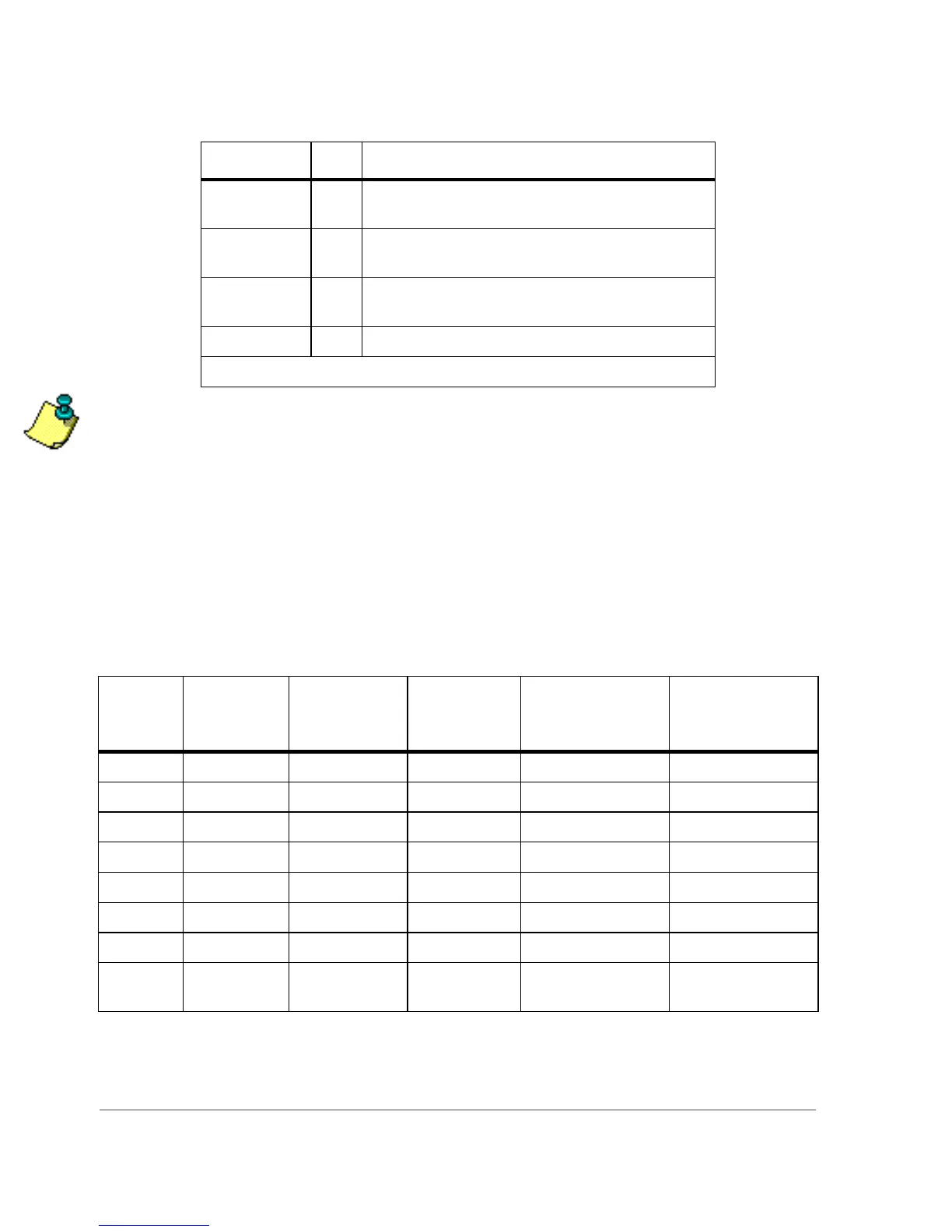
DYN: Dynamic Mode
$PASHS,DYN,d1
This command sets the dynamic mode under for the receiver where Table 6.18
outlines d1. The navigation solution uses expected dynamics for a given solution.
* Quasi-Static represents a static condition with some tolerance for slight
movements within a decimeter or two. An example would be an antenna on a
unsigned short 2 GPS week number when the last leap second was
added to GPS time
unsigned short 2 Julian day number when the last leap second was
added to GPS time (1 to 365)
unsigned short 2 GPS-UTC time difference after correction
(seconds)
unsigned short 2 Checksum (word)
Total bytes 14
Table 6.18. Dynamic Modes
d1
(Dynamic
Mode)
Description
Maximum
Horizontal
Velocity (m/s)
Maximum
Vertical
Velocity (m/s)
Maximum
Horizontal
Acceleration (m/s
2
)
Maximum Vertical
Acceleration (m/s
2
)
1Static 0 0 0 0
2 Quasi-Static * 0.1 0.02 0.1 0.02
3 Walking 2 0.5 1 0.5
4Ship 20 1 1 0.5
5 Automobile 50 3 10 1.0
6 Aircraft 1000 1000 100 100
7 Unlimited 1000 1000 100 100
8 Adaptive
Dynamic **
N/A N/A N/A
Table 6.17. $PASHR,DUG Format
Binary Type Size Content