Basic Operation 39
Basic Operation
In Prediction Mode, the calculation and output of all standard position and
velocity components are maintained. The DG16 continues to operate in
prediction mode until one of the user set masks exceeds its set limit; namely
ERM and Prediction Interval.
Navigation Solutions
The DG-16 can compute a navigation solution using either a least-squares or
Kalman filter method. Use the $PASHS,KFP,ON/OFF command to select the
navigation solution. Unless you set the DG16, the performance requirements shall
apply equally, irrespective of the selected navigation solution.
The DG16 uses statistical testing algorithms to allow for fault detection and
isolation in both least squares and Kalman filter modes. In Kalman filter, fault
detection may be provided using standard f-test and w-test. You can select either
a 2s (95%) or 3s (99%) threshold so that measurements with estimated errors
outside this threshold are rejected. Upon exceeding such thresholds, the
measurements are excluded from the navigation solution.
Anytime a position is computed and not reported through a serial port, the DG16
indicates this with warning flags. For example, if the position exceeds the ERM
setting or PDOP setting, a warning flag indicates MASK EXCEEDED.
Dynamic Modes
You can specify the dynamic mode under for the receiver using the
$PASHS,DYN,d1 command. The navigation solution uses expected dynamics for
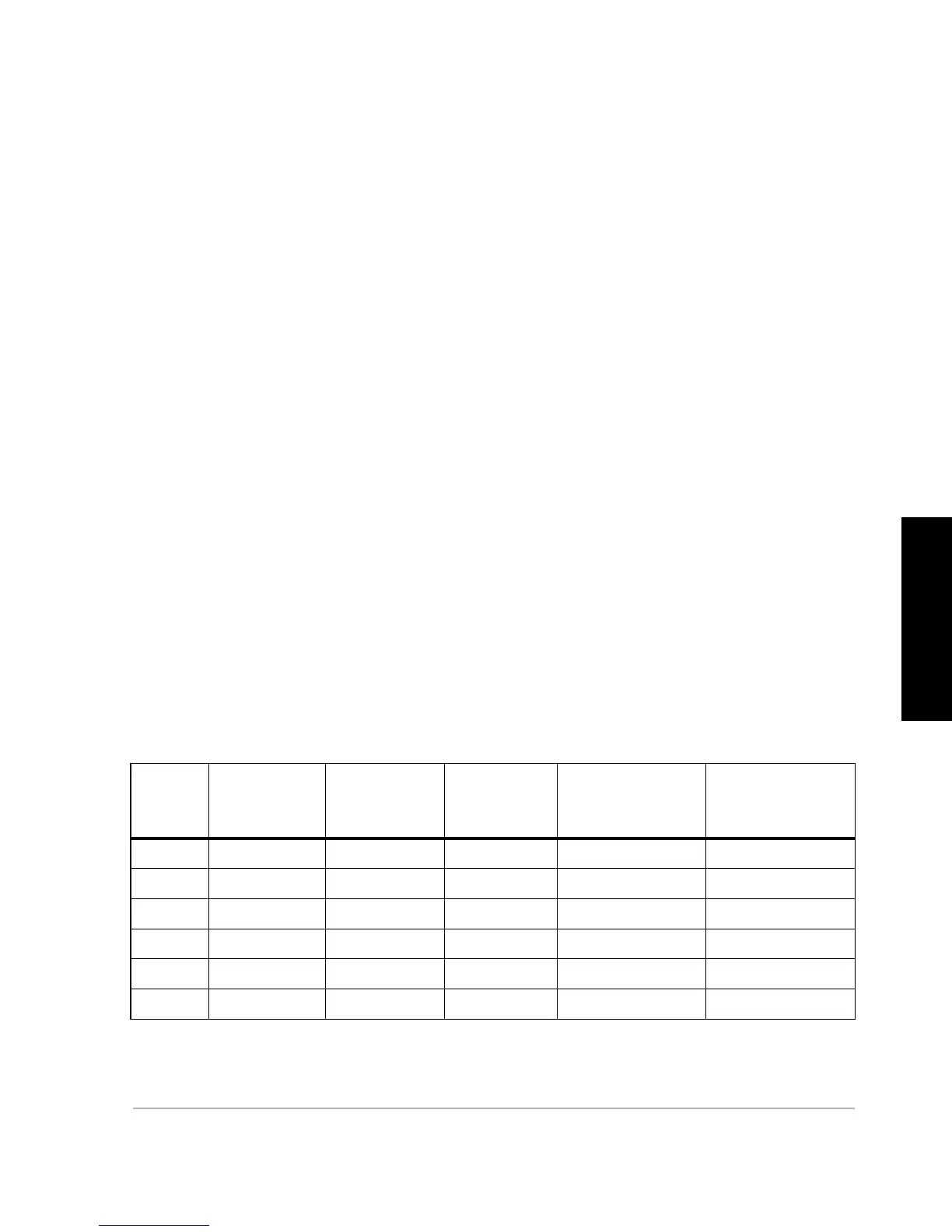
a given solution. Table 3.1 outlines the DG16 dynamics modes.
Table 3.1. Dynamic Modes
Dynamic
Mode
Description
Maximum
Horizontal
Velocity (m/s)
Maximum
Vertical
Velocity (m/s)
Maximum
Horizontal
Acceleration (m/s
2
)
Maximum Vertical
Acceleration (m/s
2
)
1Static 0 0 0 0
2 Quasi-Static * 0.1 0.02 0.1 0.02
3 Walking 2 0.5 1 0.5
4Ship 20 1 1 0.5
5 Automobile 50 3 10 1.0
6 Aircraft 400 60 20 10