128 DG14 and DG16 Board & Sensor Reference Manual
where Table 6.28 outlines the response parameters:
KFP,FDE: Kalman Filter Fault Detection and Elimination
$PASHS,KFP,FDE,x1
This command sets the fault detection and elimination parameters for the Kalman
filter where x is percent reliability of outliers and cycle slip detection in the Kalman
filter at 95, 99, or 99.9.
Example
Enter the following command to set the reliability to 99 percent:
$PASHS,FKP,FDE,99
KFP,PRI: Kalman Filter Prediction Interval
$PASHS,KFP,PRI,f1
This command sets the Kalman filter maximum prediction interval where f1 is the
prediction interval from 0 to 100 seconds. The Kalman filter stops outputting the
predicted position if the prediction interval is longer than f1 or if the position error
mask (ERM) is exceeded. If f1 is set to zero, the prediction mode is disabled/
The predicted position is flagged in the $PASHR,POS message as 8.
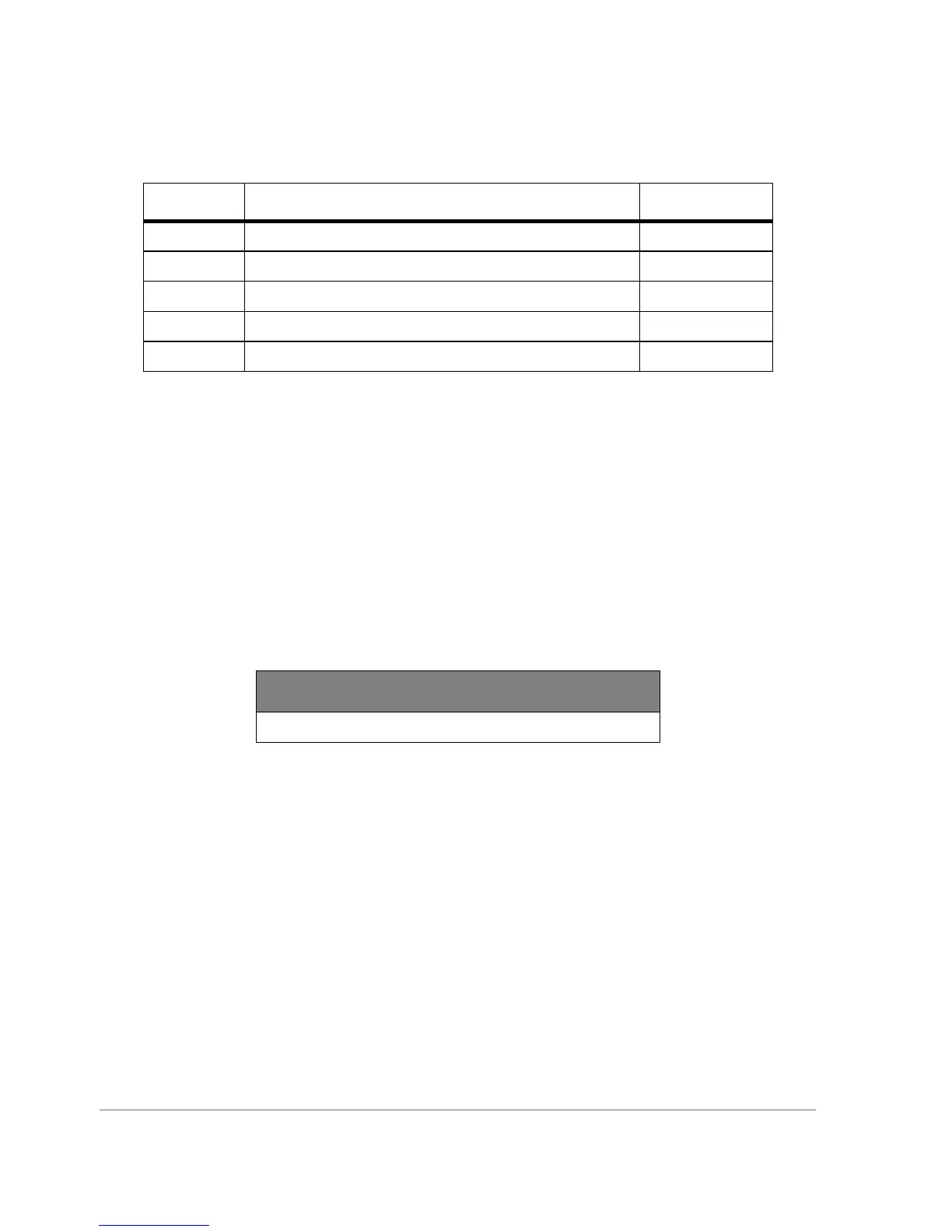
Table 6.28. KFP Message Structure
Parameter Description Range
KFP SETUP
MODE The currently set Kalman Filter mode. ON, OFF
PRI The current setting for the prediction interval. 0 to 100
FDE The fault detection value for the Kalman filter. 95, 99, or 99.9
PAR Reserved for internal use.
DEFAULT SETTINGS
KFP,FDE—99