146 Softstarter theory CG Drives & Automation 01-5980-01r2
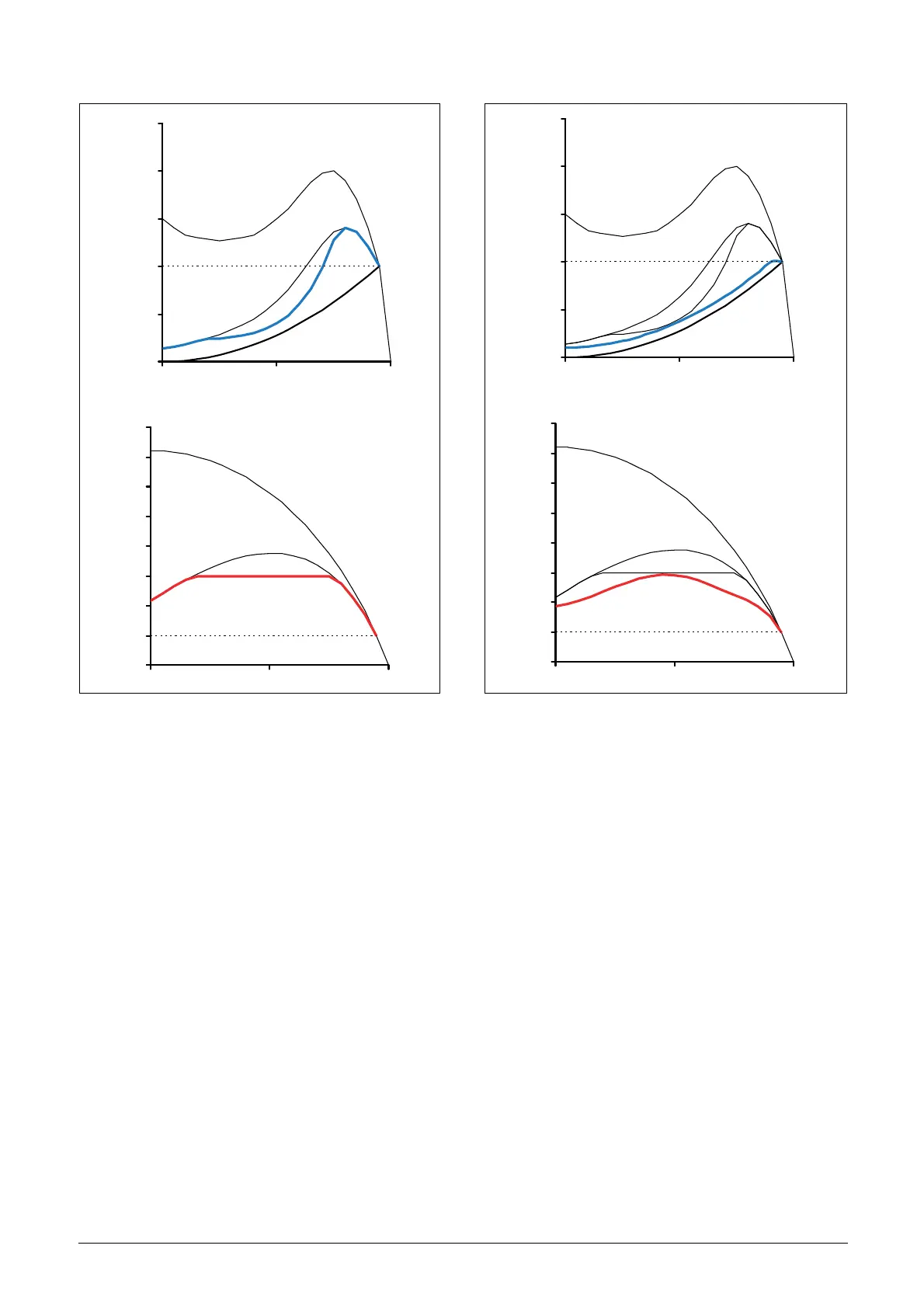
Fig. 89 Soft starting – voltage ramp with current limit
Once again the figure illustrates that the resulting
performance depends on the combination of motor and load
characteristics. In the example above the motor torque is
close to the load torque at about half speed. This means for
some other applications with different load characteristics
(for example a linear torque-speed correlation) this
particular motor would need more than three times the
nominal current to start.
The most sophisticated electronic softstarters use torque
control, which results in an almost constant acceleration
during the start. A low starting current is also achieved.
However, this start method also uses reduced motor voltage
and the quadratic correlation between current and torque
described in the first section of this chapter is still valid. This
means, the lowest possible starting current is determined by
the combination of motor and load characteristics.
Fig. 90 Soft starting – torque control
For optimal starting performance, correct setting of the
softstarter’s parameters such as initial torque and end torque
at start and start time is important. The choice of parameters
is explained in detail in section 8.3.3, page 91.
I/I
n
n/n
s
Torque
T/T
n
n/n
s
Current
I/I
n
n/n
s
Torque
T/T
n
n/n
s
Current

 Loading...
Loading...