11.3 The actual controller in CSMIO/IP-A
In practice we often use so called: cascade controllers, which correct errors much better on during dynam-
ic work. The cascade controller is usually just three PID controllers connected in series.
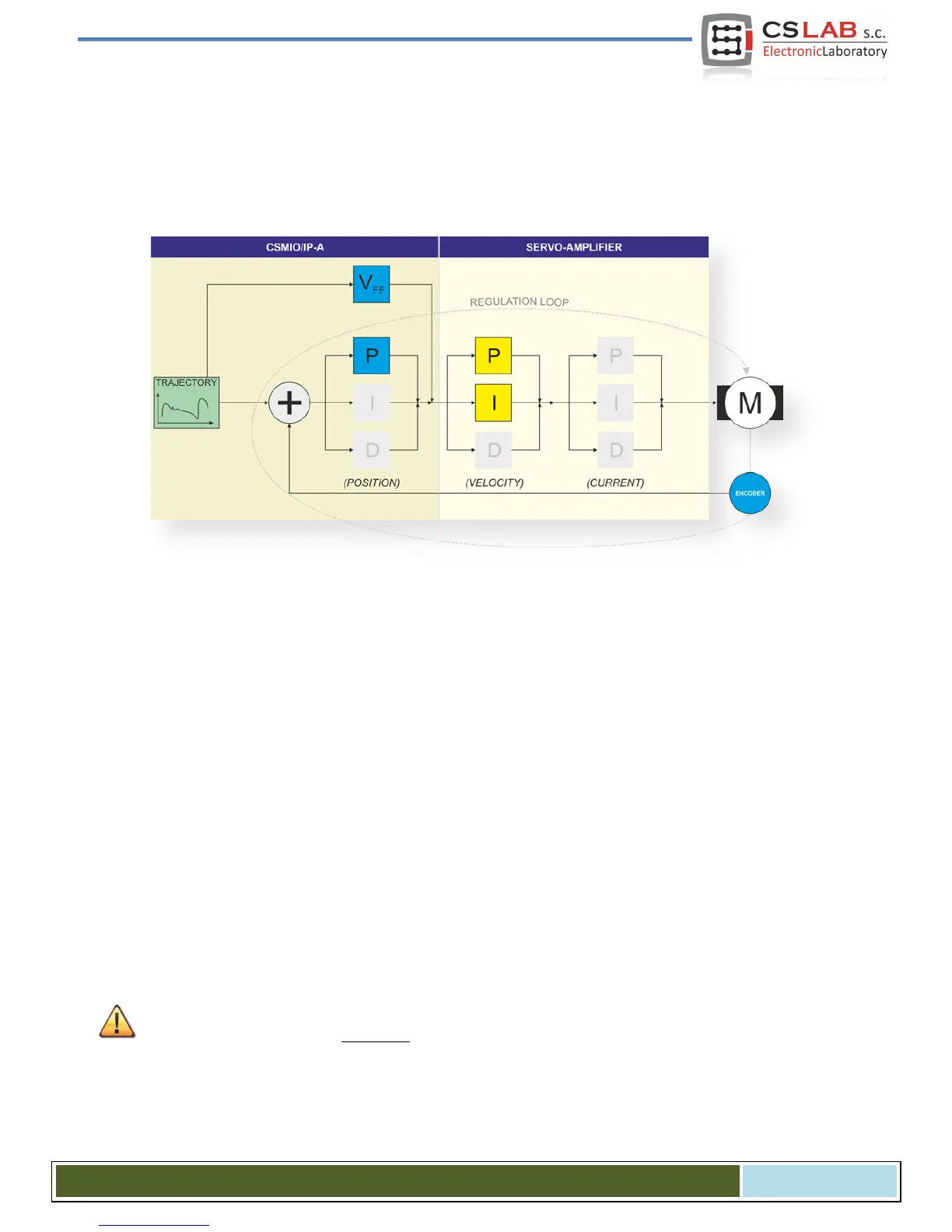
In fact a complete control loop for CSMIO/IP-A and servo amplifier looks as follows:
• TRAJECTORY : set motion trajectory
• POSITION : position PID controller
• VELOCITY : velocity PID controller
• CURRENT : current PID controller
All the parameters that usually do not need to be tuned are marked in grey. There is also division market,
where the controllers are placed. As you can see in CSMIO/IP-A there is only a position controller and
"predicting" element – „V
FF
”. The velocity and current controllers are in servo amplifier.
11.4 The order of controllers tuning
We always start the cascade controller tuning from a motor side. We usually get a set: a servo motor + a
servo amplifier and there is no need to tune a current controller so we tune as follows:
• Velocity PID controller (in a servo amplifier)
• Position PID controller (in CSMIO/IP-A)
• „V
FF
” predicting element (in CSMIO/IP-A)
Very common mistake is tuning the PID controller in CSMIO/IP-A when PID controller in servo amplifier is
not tuned. In this situation it is
impossible to tune the entire system properly.
CS- Lab s.c. – CSMIO/IP- A - CNC controller
Page 80