11.8 Autotuning – Automatic PID tuning
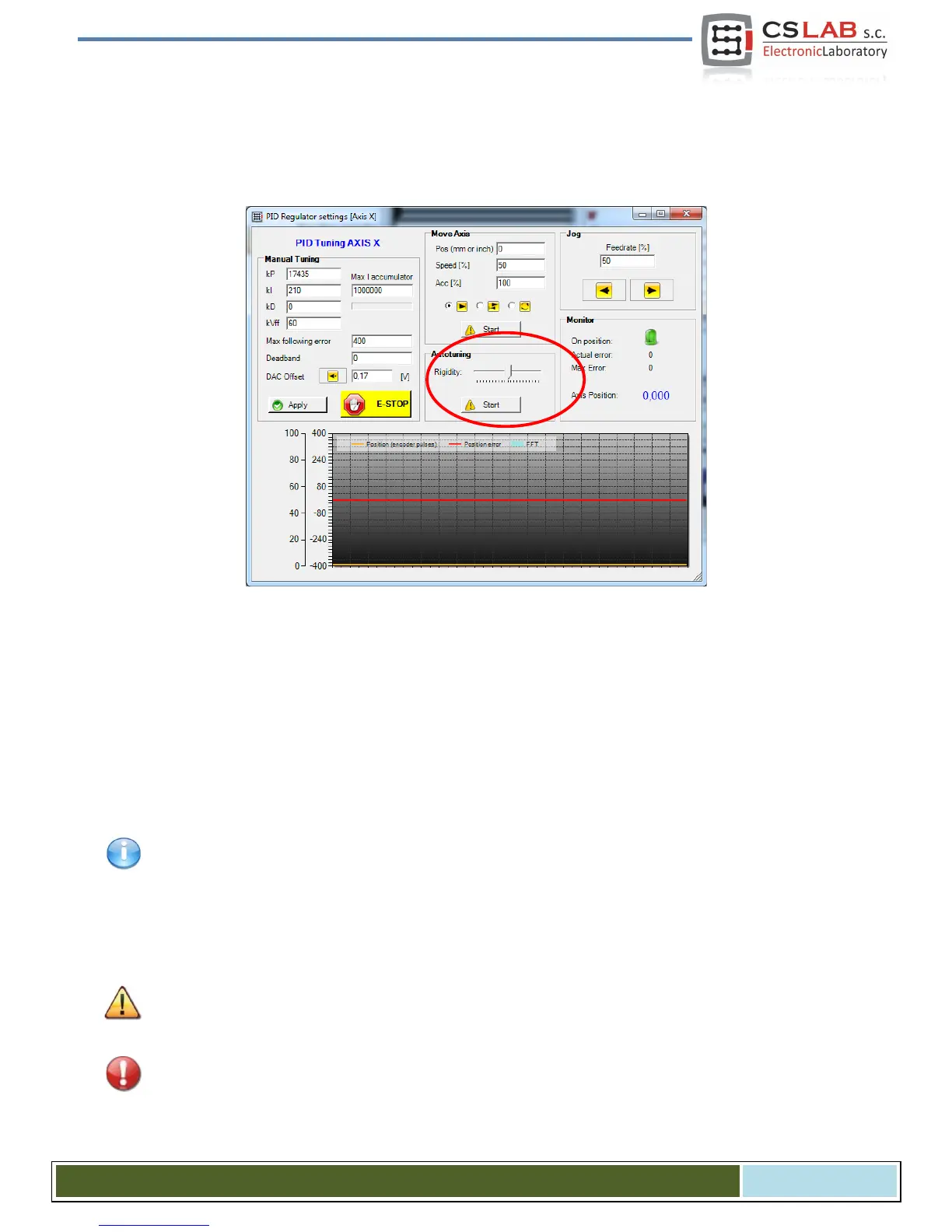
The CSMIO/IP-A is equipped with PID controller automatic tuning function, it can be called from PID tuning
window – „ConfigConfigPlugInsCONFIG” „PID Tuning”.
Before we activate the automatic tuning function axes should be scaled and also acceleration and max.
speed of axes should be set in „ConfigMotor Tuning”.
For autotuning we need to set only one parameter – Rigidity. The highest is the value of the parameter the
"sharper" gain parameters will be matched, but also oscillation risk will be higher. In general it is recom-
mended to leave the slider in the middle position.
Before we start autotuning we should enter large value e.g. „1000000” in „Max I accumulator” area and we
should quite high max. Permissible error in „Max following error” – e.g. 10000 imp.
Very common mistake is autotuning performing when speed PID controller of servo amplifier is tuned
incorrectly. Badly tuned servo amplifier causes that correct tuning of the controller CSMIO/IP-A is IM-
POSSIBLE. A servo amplifier should be tuned first and then we can tune the CSMIO/IP-A. You should re-
member that autotuning in servo amplifiers very often does not work very well and is not even close to set
correct parameters.
Autotuning function requires axis moving at the time. We should ensure place for that by setting an axis
manually in the middle of workspace.
A servo drive during tuning can do some rapid moves or go into oscillations. Before we start autotuning
verify if E-STOP button works correctly and be ready to press it immediately.
CS- Lab s.c. – CSMIO/IP- A - CNC controller
Page 87