11.6 Manual PID regulator tuning procedure in CSMIO/IP-A
Reading the description of PID controller in previous section, it is easy to imagine how the particular ele-
ments handle with a position error. But there is a catch. Each of the mentioned elements has a parameter
that regulates its gain. If the gain for the particular element is set incorrectly it may not work properly, it
will cause vibrations, noise and in extreme cases even machine mechanic breakdown.
Although proper tuning of a machine is not hard at all, in practice to do it right experience is very useful.
Inexperienced installers who till now worked only with e.g. stepper motor, the tuning procedure may cause
many problems. If you do not feel like doing it by yourself it is better to look for help from someone more
experienced.
To start PID regulator tuning in CSMIO/IP-A, a machine tool should be initially configured, especially I/O
signals, E-Stop should be checked as well as speed and axis scaling and acceleration.
Remember to tune a servo amplifier first in other way you will not be able to tune the regulator in
CSMIO/IP-A properly.
When tuning the safest way is to have a motor of only one (tuned) axis connected. Other motors should be
disconnected or power supply of servo amplifier should be disconnected.
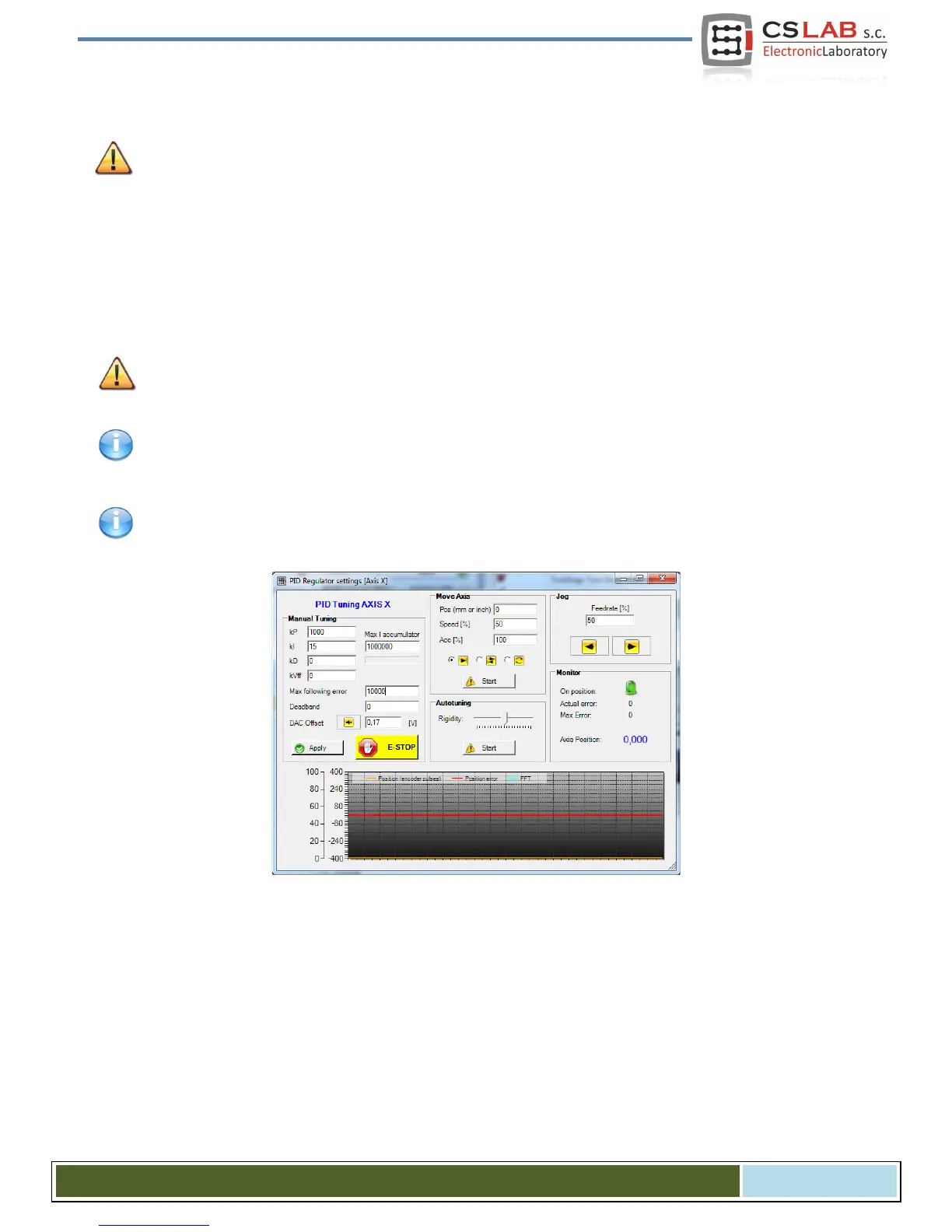
• First - enter some small gain values at the beginning. It may be like in the picture above:
kP=1000, kI=15, kD=0, kVff=0. Max I Accumulator to 1000000. Set large maximal error (a
value corresponding to 1-2 motor revs).
CS- Lab s.c. – CSMIO/IP- A - CNC controller
Page 83