6. Function blocks
6.1 Manufacturer function blocks
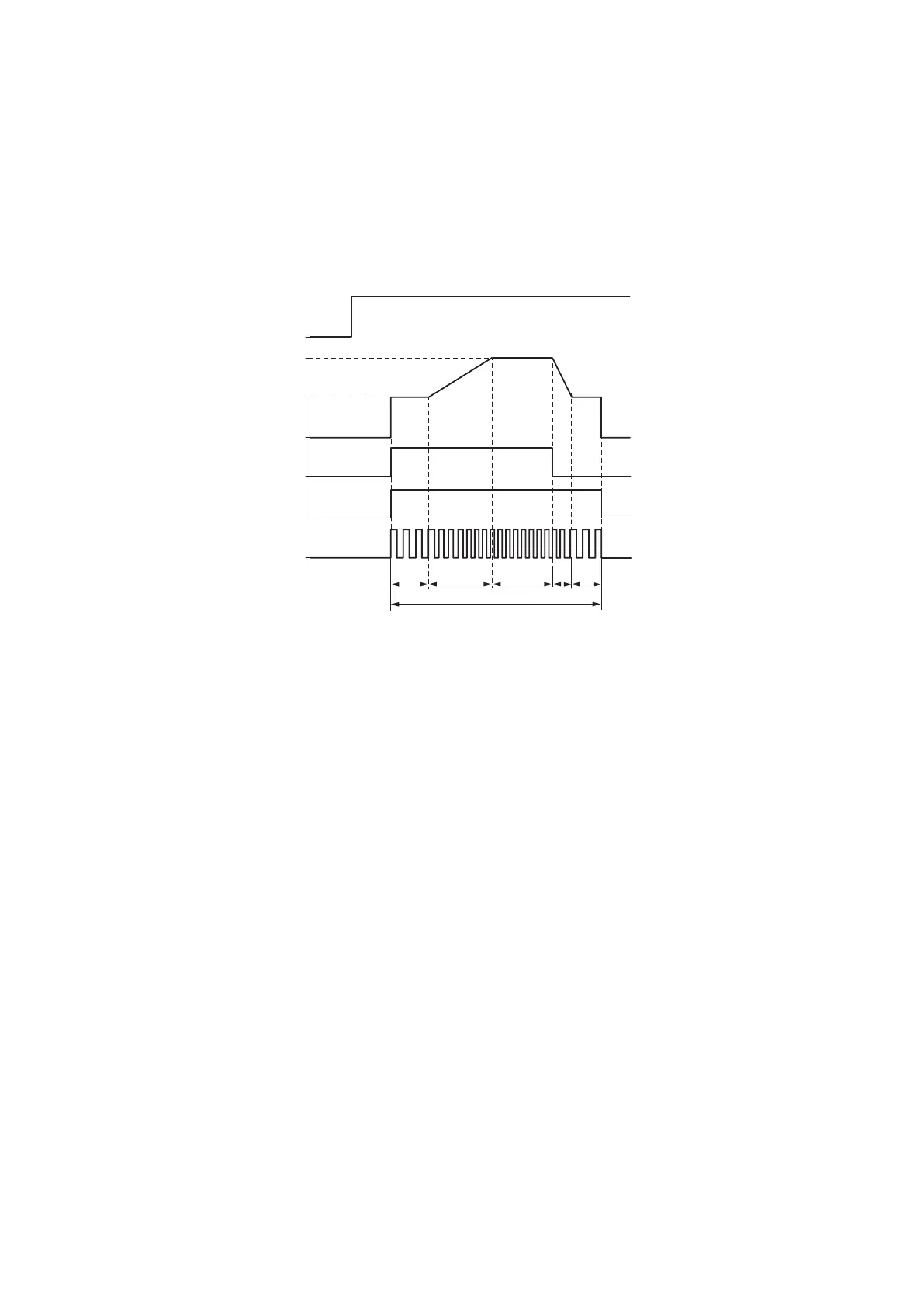
Number of steps in jog mode P1 not reached:
If the number of steps P1 has not been reached after the deceleration phase ends,
the motor will be driven with start frequency FS until the specified number of steps is
reached. Device output Q1/2 will not be switched off until then.
A
B C D E F
Q1/2
AC
EN
PF
FS
TP
QF
> 0.5 s
Fig. 201: Signal diagram for jog mode with specified jog frequency, P1 not reached after deceleration
phase
PF: Jog frequency
FS: Start frequency
QF: Current output frequency
TP: Jog command
AC: Positioning job active
A: Complete distance if active TP on time is longer than 0.5 sec.
B: During the first 0.5 sec, the distance is traversed with specified start frequency FS.
C: This is followed by the acceleration phase with RF all the way to the jog frequency.
D: Motion continues with jog frequency PF.
E: The deceleration phase is initiated with jog command TP = 0 and the frequency of the pulse sequence
is reduced to the start frequency with BF.
F: Distance after deceleration phase until the specified number of steps P1 is reached with start fre-
quency FS.
How the run-on distance (phase F) is determined
P1 and the on time for jog mode TP=1 need to be added to the sample parameters
defined in "Parameters for jog operation."
FS = start frequency = 200 Hz
PF = 1000 Hz
RF = Acceleration frequency change = 500 mHz/step
BF = Frequency change in the braking phase = 2000 mHz/step
easyE402/24 MN050009ENEaton.com
399