6. Function blocks
6.1 Manufacturer function blocks
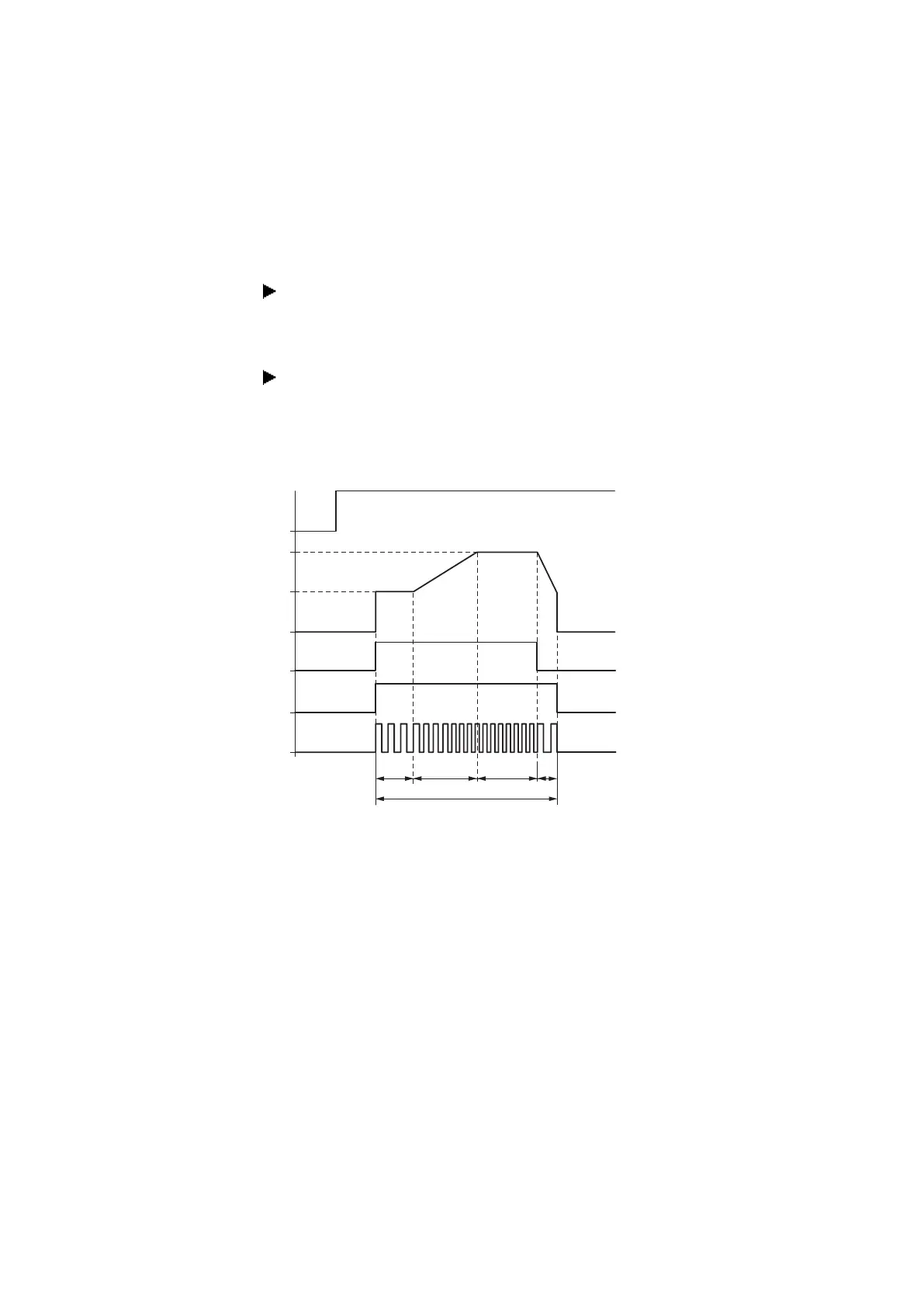
Positioning with specified jog frequency PF (defined maximum frequency)
TP on time > 0.5 seconds
When using this operating mode, you can control the distance manually by keeping
the state at function block input TP at "1" for a time > 0.5 seconds.
Switch the TP input to 1 for a duration > 0.5 seconds.
The motor starts moving for the duration of 0.5 s with start frequency FS and is then
accelerated to jog frequency PF with frequency change RF.
End jog mode with TP = 0.
Number of steps in jog mode P1 reached
If the number of steps P1 is reached after the deceleration phase ends, device output
Q1/2 will be switched off.
A
B C D E
Q1/2
AC
EN
PF
FS
TP
QF
> 0.5 s
Fig. 200: Signal diagram for jog mode with specified jog frequency, P1 after deceleration phase reached
PF: Jog frequency
FS: Start frequency
QF: Current output frequency
TP: Jog command
AC: Positioning job active
A: Complete distance if active TP on time is longer than 0.5 sec.
B: During the first 0.5 sec, the distance is traversed with specified start frequency FS.
C: This is followed by the acceleration phase with RF all the way to the jog frequency.
D: Motion continues with jog frequency PF.
E: The deceleration phase is initiated with jog command TP = 0 and the frequency of the pulse sequence
is reduced to the start frequency with BF.
398
easyE402/24 MN050009ENEaton.com