Safety
Information
Introduction
Product
Information
System
configuration
Mechanical
Installation
Electrical
Installation
Getting
Started
Basic
parameters
Running
the motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
Data
Diagnostics
UL Listing
Information
176 Unidrive SPM User Guide
www.controltechniques.com Issue Number: 3
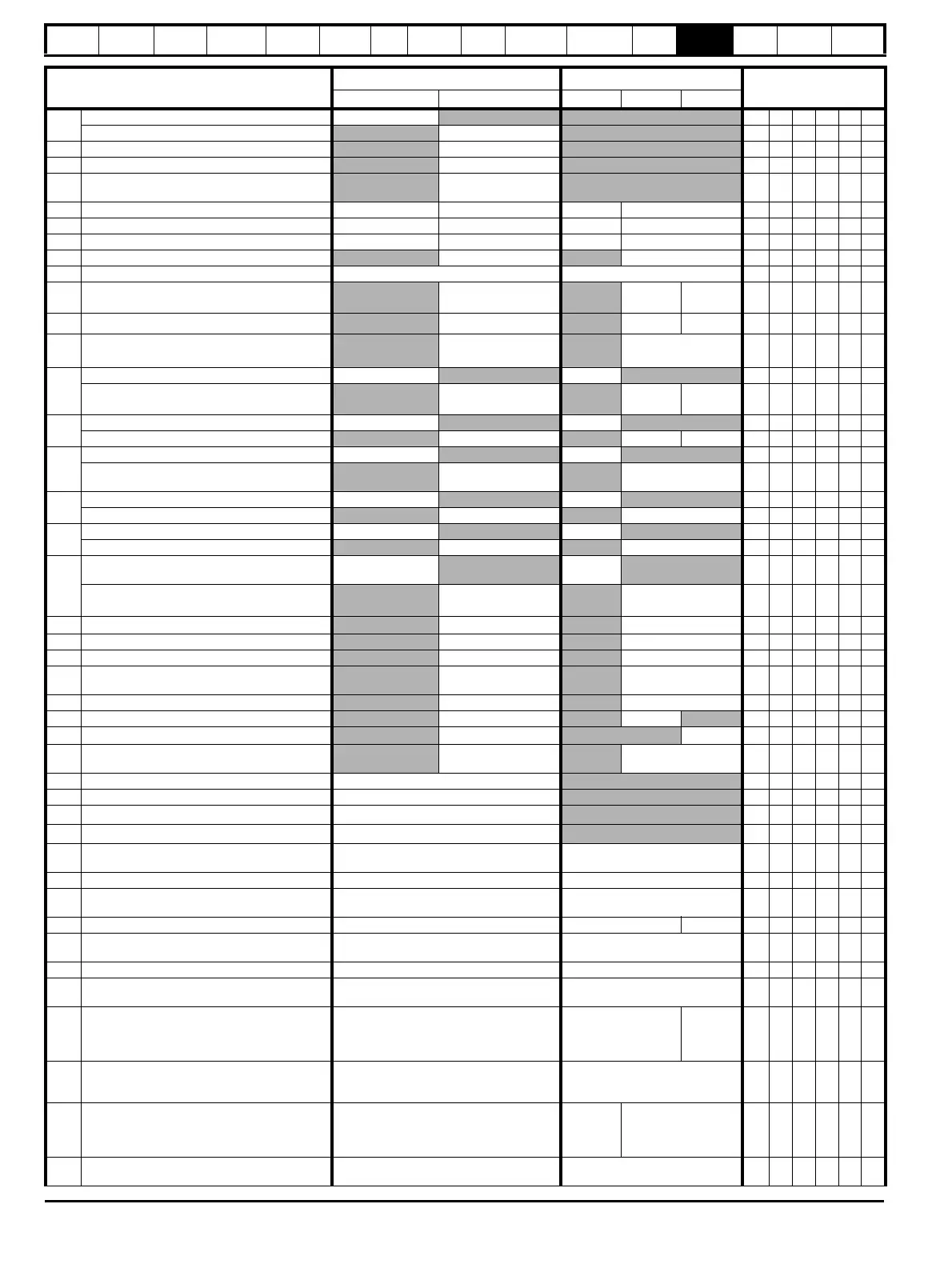
Parameter
Range(
Ú)Default(Ö)
Type
OL CL OL VT SV
3.01
OL> Frequency slaving demand ±1,000.0 Hz
RO Bi FI NC PT
CL> Final speed reference
±SPEED_MAX rpm RO Bi FI NC PT
3.02 Speed feedback {0.10}
±SPEED_MAX rpm RO Bi FI NC PT
3.03 Speed error
±SPEED_MAX rpm RO Bi FI NC PT
3.04 Speed controller output
±Torque_prod_
current_max %
RO Bi FI NC PT
3.05 Zero speed threshold 0.0 to 20.0 Hz 0 to 200 rpm 1.0 5 RW Uni US
3.06 At speed lower limit 0.0 to 3,000.0 Hz 0 to 40,000 rpm 1.0 5 RW Uni US
3.07 At speed upper limit 0.0 to 3,000.0 Hz 0 to 40,000 rpm 1.0 5 RW Uni US
3.08 Overspeed threshold {0.26}
0 to 40,000 rpm 0RWUni US
3.09 Absolute ‘at speed’ detect OFF (0) or On (1) OFF (0) RW Bit US
3.10 Speed controller proportional gain (Kp1) {0.07}
0.0000 to 6.5535
1/rad s
-1
0.0300 0.0100 RW Uni US
3.11 Speed controller integral gain (Ki1) {0.08}
0.00 to 655.35 s/rad s
-1
0.10 1.00 RW Uni US
3.12
Speed controller differential feedback gain
(Kd1)
{0.09}
0.00000 to 0.65535
s
-1
/rad s
-1
0.00000 RW Uni US
3.13
OL> Enable frequency slaving OFF (0) or On (1)
OFF (0) RW Bit US
CL> Speed controller proportional gain
(Kp2)
0.0000 to 6.5535
1/rad s
-1
0.0300 0.0100 RW Uni US
3.14
OL> Slaving ratio numerator 0.000 to 1.000
1.000 RW Uni US
CL> Speed controller integral gain (Ki2)
0.00 to 655.35 1/rad 0.10 1.00 RW Uni US
3.15
OL> Slaving ratio denominator 0.001 to 1.000
1.000 RW Uni US
CL> Speed controller differential feedback
gain (Kd2)
0.00000 to 0.65535 s 0.00000 RW Uni US
3.16
OL> Enable frequency slaving output OFF (0) or On (1)
OFF (0) RW Bit US
CL> Speed controller gain select
OFF (0) or On (1) OFF (0) RW Bit US
3.17
OL> Select x2048 output OFF (0) or On (1)
On (1) RW Bit US
CL> Speed controller set-up method
0 to 3 0RWUni US
3.18
OL> Select F and D frequency slaving
output
OFF (0) or On (1)
OFF (0) RW Bit US
CL> Motor and load inertia
0.00010 to 90.00000
kg m
2
0.00000 RW Uni US
3.19 Compliance angle
0.0 to 359.9 °
4.0 RW Uni US
3.20 Bandwidth
0 to 255 Hz 10 RW Uni US
3.21 Damping factor
0.0 to 10.0 1.0 RW Uni US
3.22 Hard speed reference
±SPEED_FREQ_
MAX rpm
0.0 RW Bi US
3.23 Hard speed reference selector
OFF (0) or On (1) OFF (0) RW Bit US
3.24 Closed-loop vector mode
VT> 0 to 3 0 RW Uni US
3.25 Encoder phase angle* {0.43}
SV> 0.0 to 359.9 °
0.0 RW Uni US
3.26 Speed feedback selector
drv (0), SLot1 (1),
SLot2 (2), SLot3 (3)
drv (0) RW Txt US
3.27 Drive encoder speed feedback ±40,000.0 rpm RO Bi FI NC PT
3.28 Drive encoder revolution counter 0 to 65,535 revolutions
RO Uni FI NC PT
3.29 Drive encoder position {0.11}
0 to 65,535 1/2
16
ths of a revolution
RO Uni FI NC PT
3.30 Drive encoder fine position
0 to 65,535 1/2
32
nds of a revolution
RO Uni FI NC PT
3.31
Drive encoder marker position reset
disable
OFF (0) or On (1) OFF (0) RW Bit US
3.32 Drive encoder marker flag OFF (0) or On (1) OFF (0) RW Bit NC
3.33
Drive encoder turn bits / Linear encoder
comms to sine wave ratio
0 to 255 16 RW Uni US
3.34 Drive encoder lines per revolution {0.27} 0 to 50,000 1024 4096 RW Uni US
3.35
Drive encoder single turn comms bits /
Linear encoder comms bits / Marker mode
0 to 32 bits 0 RW Uni US
3.36 Drive encoder supply voltage** 5V (0), 8V (1), 15V (2) 5V (0) RW Txt US
3.37 Drive encoder comms baud rate
100 (0), 200 (1), 300 (2), 400 (3), 500 (4),
1000 (5), 1500 (6), 2000 (7) kBaud
300 (2) RW Txt US
3.38 Drive encoder type
Ab (0), Fd (1), Fr (2), Ab.SErvo (3),
Fd.SErvo (4), Fr.SErvo (5), SC (6),
SC.Hiper (7), EndAt (8), SC.EndAt (9),
SSI (10), SC.SSI (11)
Ab (0)
Ab.SErvo
(3)
RW Txt US
3.39
Drive encoder termination select / Rotary
encoder select / Comms only encoder
mode
0 to 2 1 RW Uni US
3.40 Drive encoder error detection level
Bit 0 (LSB) = Wire break detect
Bit 1 = Phase error detect
Bit 2 (MSB) = SSI power supply bit monitor
Value is binary sum
01RWUniUS
3.41
Drive encoder auto-configuration / SSI
binary format select
OFF (0) or On (1) OFF (0) RW Bit US

 Loading...
Loading...








