87
EN
Fitting the welding system to a PAP robot
Safety
Fitting the TPS/i
welding system
to a PAP robot
Individual components must be fitted to the robot in the following order:
1. Robot holder(s) must have already be fitted first
2. SplitBox
3. For CMT applications only: Wire buffer
4. CrashBox Drive /i
5. WF Robacta Drive
6. Torch hosepack
7. Interconnecting hosepack
8. Unreeling wirefeeder
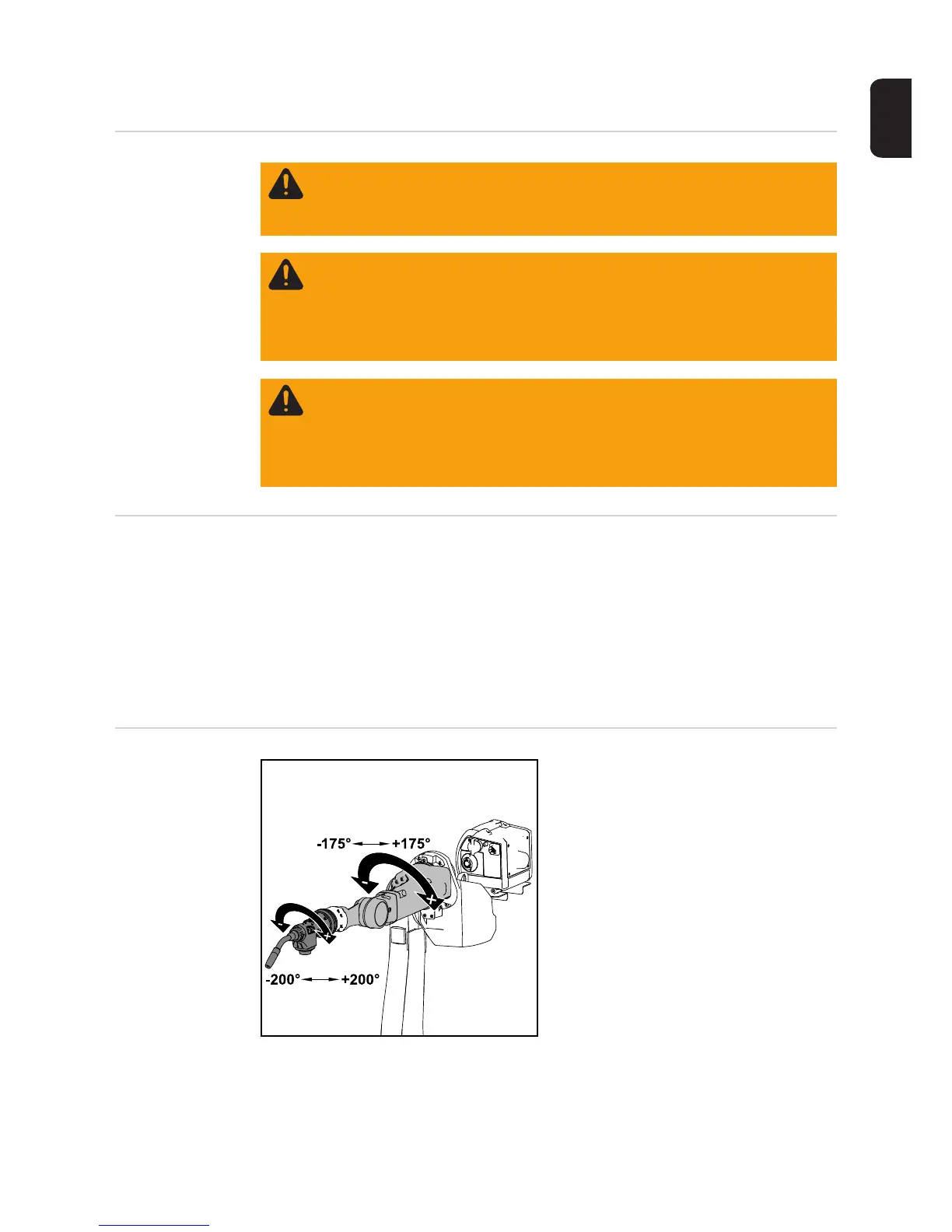
Maximum axis ro-
tation
WARNING! Work that is carried out incorrectly can cause serious injury or dam-
age. The following activities may only be carried out by trained and qualified per-
sonnel. The operating instructions for system components, particularly the
chapter entitled "Safety rules", must be observed.
WARNING! An electric shock can be fatal. Before starting the work described be-
low:
- turn the power source mains switch to the "O" position
- disconnect the power source from the mains
- ensure that the power source remains disconnected from the mains until all
work has been completed
WARNING! Risk of serious injury and damage from articles being dropped. All
the screw connections described below:
- must be checked after fitting to ensure they are tight
- must be checked following an unusual operating situation (e.g. crash) to en-
sure they are tight
- must be checked regularly to ensure they are tight