t
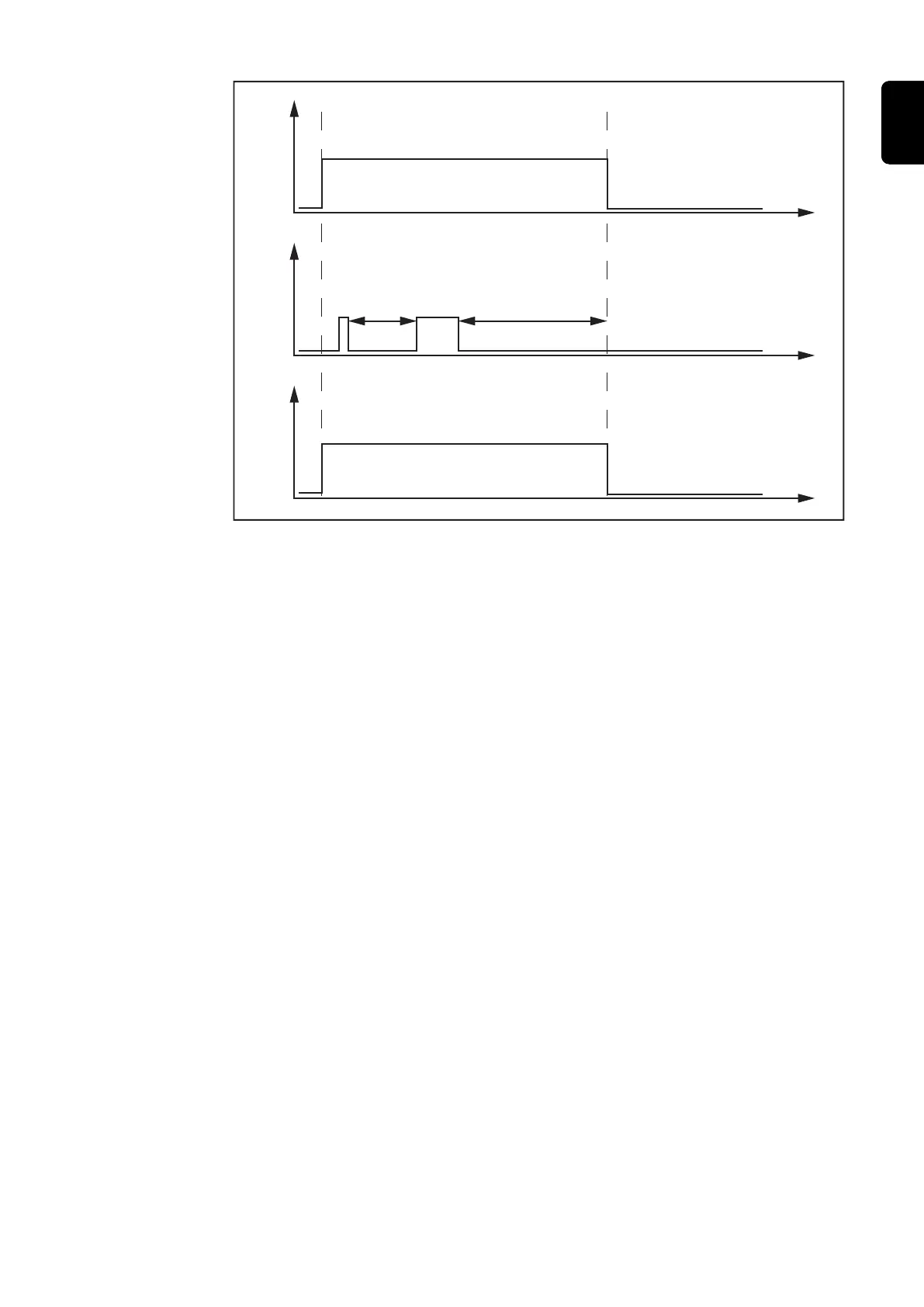
Current flow
(Digital Output)
Arc stable
(Digital Output)
t
Welding start
(Digital Input)
arc break
<190ms
t
arc break
<200ms
(1)
Example of Arc Break Monitoring Behavior
(1) The status of the Welding start signal is dependent on:
- The arc break monitoring setting
- The robot setting (how the robot should react to the "Ignore" setting on the arc break
monitoring)
For the "Ignore" setting:
- The robot sets the Welding start signal to Low (= no reignition of the arc), or
- Leaves the Welding start signal on High (= reignition of the arc) – depending on the
robot setting
For the "Error" setting:
- An error message is output and the welding process is stopped
47
EN-US