General
Data Types Used UINT 16 (Unsigned Integer) = Whole number in the range from 0 to 65,535
SINT 16 (Signed Integer) = Whole number in the range from -32,768 to 32,767
Conversion examples:
- For a positive value (SINT 16) = desired wire speed x factor = 12.3 m/min x 100 =
1230
dec
= 04CE
hex
- For a positive value (SINT 16) = desired arc length correction x factor = -6.4 x 10 =
-64
dec
= FFC0
hex
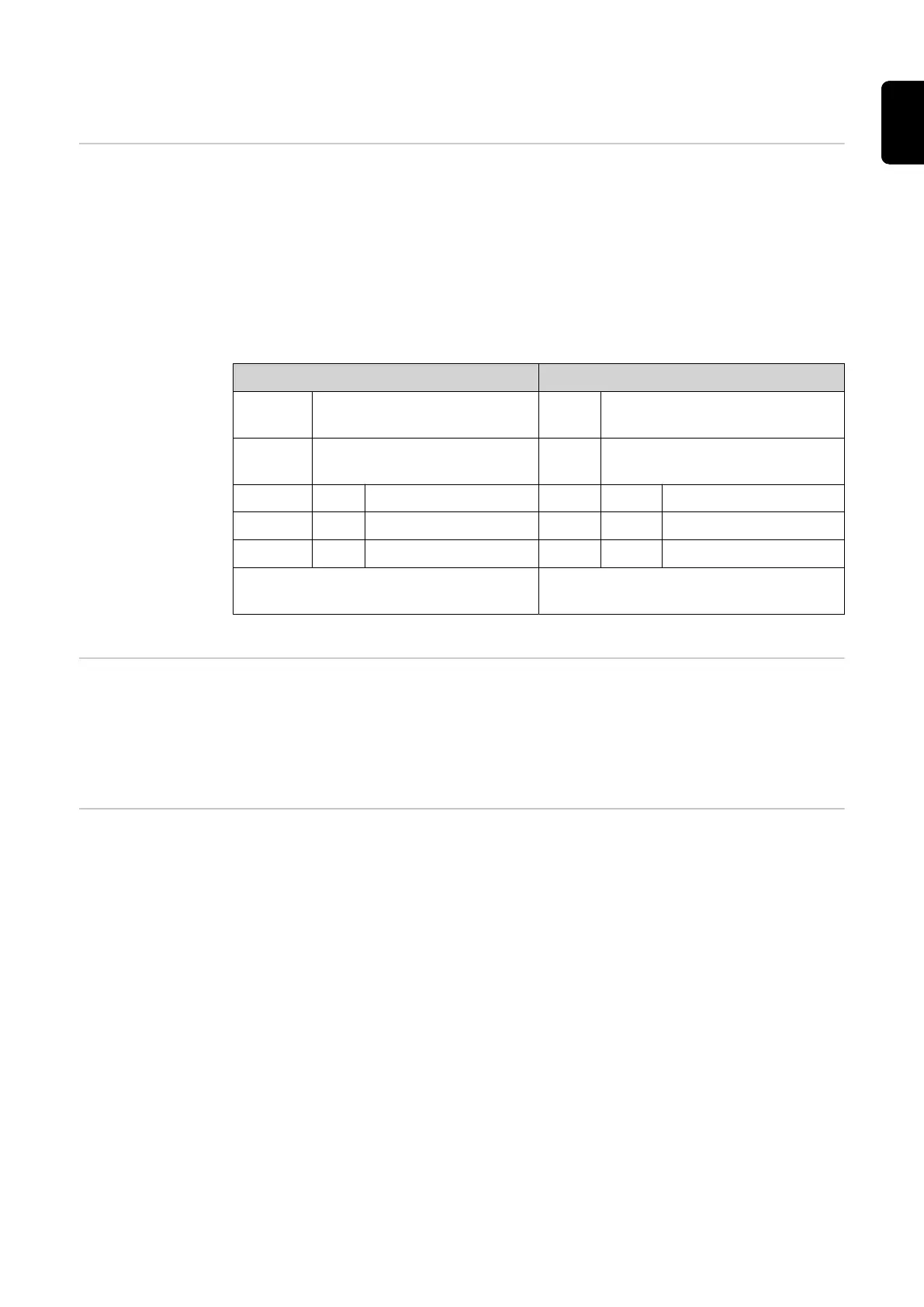
Unsigned (UINT): Signed (SINT):
Type: Unsigned 16 Bit integer = 16
bits
Type: Signed 16 Bit integer (15 bits +
1 Sign Bit*)
Range: 0 to 65535 Rang
e:
-32768 to 32767
0000 -10 (0000000000000000) 0000 0000 (0*000000000000000)
32767 0 (0111111111111111) 56 56 (0*000000000111000)
65535 +10 (1111111111111111) -64 -64 (1*111111111000000)
* = if the value entered has a negative
sign, the sign Bit is High – see markings
Behavior of the
Power Source
when an Interface
is Connected
If a power source from the TPS/i series is connected to a robot interface, the settings on
the power source remain unchanged (2-step mode, special 2-step mode, etc.).
If a power source from the TPS series is connected to a robot interface, the power
source automatically selects 2-step mode.
Availability of
Functions
As a result of updates, certain functions may be available on your device that are not
described in this document, or vice versa.
5
EN-US