ADL300 • Appendix 137
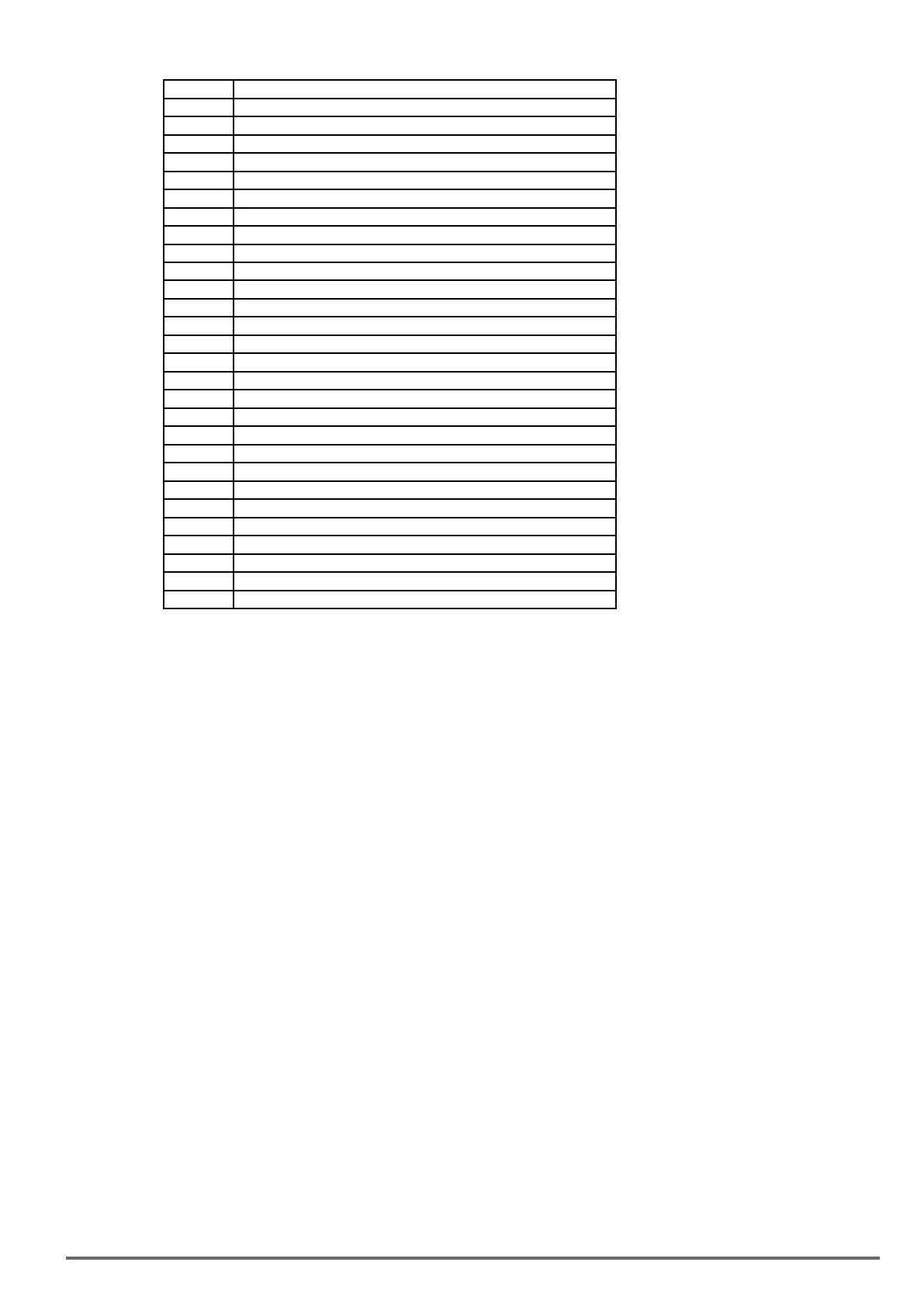
1005 COB-ID SYNC Message
1006 Communication cycle period
1008 Manufacterer Device Name
1010 Store parameter
1009 Manufacturer Hardware Version
100A Manufacturer Software Version
100C Guard Time
100D Life Time Factor
1014 COB-ID Emergency
1016 HeartBeat time consumer
1017 HeartBeat time producer
1018 Identity object
1029 Error behavior object
1400 1st Receive PDO
1401 2nd Receive PDO
1402 3rd Receive PDO
1403 4th Receive PDO
1600 Receive PDO1 mapping parameter
1601 Receive PDO2 mapping parameter
1602 Receive PDO3 mapping parameter
1603 Receive PDO4 mapping parameter
1A00 Transmit PDO1 mapping parameter
1A01 Transmit PDO2 mapping parameter
1A02 Transmit PDO3 mapping parameter
1A03 Transmit PDO4 mapping parameter
1800 1st Transmit PDO
1801 2nd Transmit PDO
1802 3rd Transmit PDO
1803 4th Transmit PDO
Table1.5.1: Objects used by the CANopen communication profile
The objects shown in bold in the table allow writing of the parameters assigned with the exchange of data in the
PDO.
The allocation criterion is variable, and depends on the size (in bytes) of the parameter exchanged.
1.1.6 RX PDO Entries
The structure of the PDO Communication Parameter (index 1400h, 1401h) is:
1) Subindex 0 (Number of supported entries ) = 2
2) The structure of Subindex 1 (COB-ID used by the PDO) is:
- Bit 31 (valid/invalid PDO) can be set via SDO.
- Bit 30 (RTR Remote Transmission Request) = 0 because this function is not supported.
- Bit 29 = 0 because the 11-bit ID is used (CAN 2.0A).
- Bits 11-28 are not used.
- Bit 0-10 COB-ID (see table 1.4.1).
3) Cyclic-synchronous Subindex 2 (Transmission Type), or synchronous according to the master performed setting (1 if
SYNC has been foreseen, 254...255 if asynchronous). If not stated, the synchronous mode is active.
1.1.7 TX PDO Entries
The structure of the PDO Communication Parameter (index 1800h, 1801h) is:
1) Subindex 0 (Number of supported entries ) = 3
2) The structure of Subindex 1 (COB-ID used by the PDO) is:
- Bit 31 (valid/invalid PDO) can be set via SDO.
- Bit 30 (RTR Remote Transmission Request) = 0 because this function is not supported.
- Bit 29 = 0 because the 11-bit ID is used (CAN 2.0A).
- Bits 11-28 are not used.
- Bit 0-10 COB-ID (see table 1.4.1).
3) Cyclic-synchronous Subindex 2 (Transmission Type), or synchronous according to the master performed setting (1 if
SYNC has been foreseen, 254...255 if asynchronous). If not stated, the synchronous mode is active.
4) Inhibit time.

 Loading...
Loading...







