31
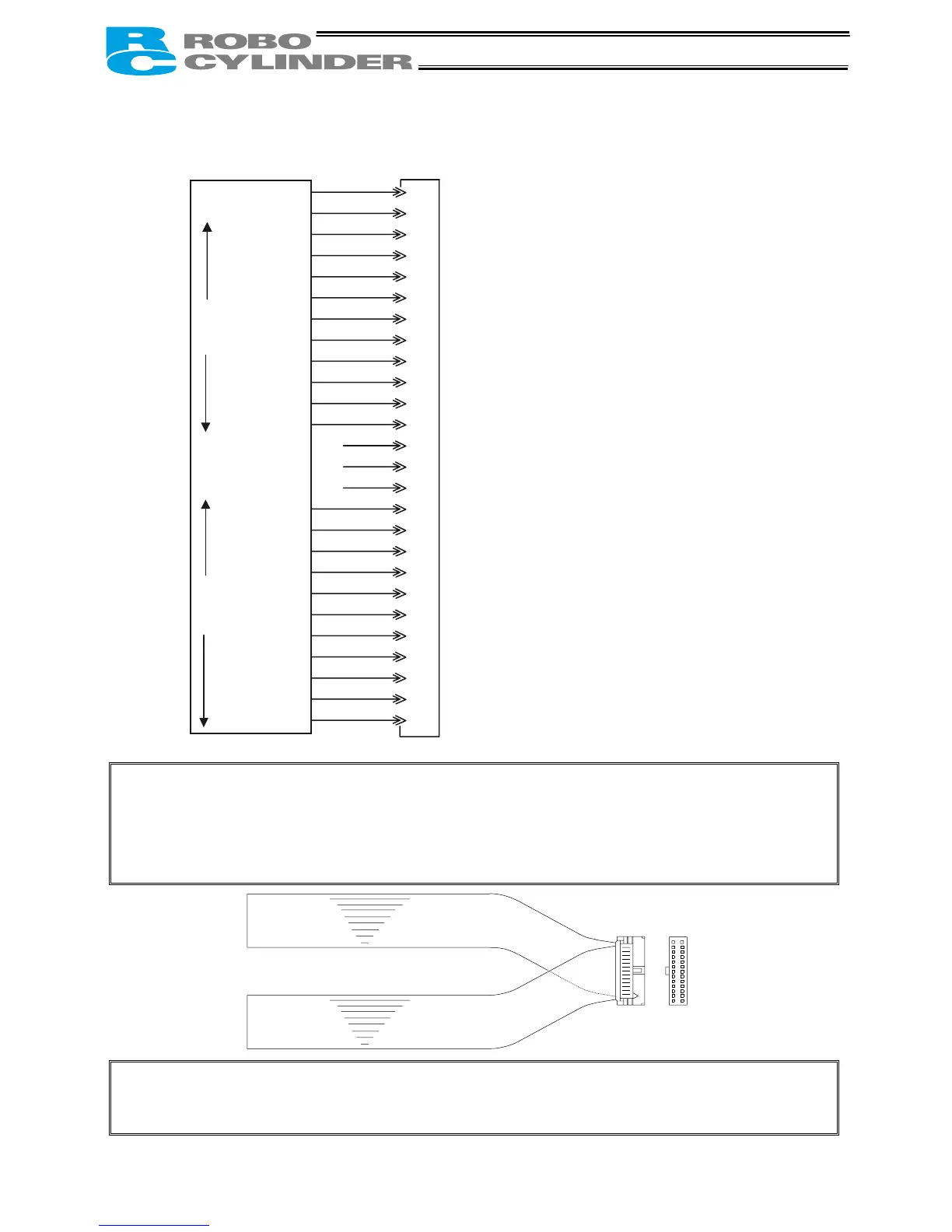
z PIO pattern 4 [Teaching]
Note: The factory-set PIO pattern is [Conventional], so change the value in user parameter No. 25 to
“4.”
To enable the servo ON signal, be sure to set user parameter No. 21 to “0.”
Be sure to enable the pause signal using user parameter No. 15 (by setting the parameter to
“0”) (the pause signal is enabled at the factory). The system cannot switch to the teaching
mode if the pause signal is disabled (i.e., the above parameter is set to “1”).
Note: When performing a continuity check of the flat cable, pay due attention not to expand the
female pins in the connector. It may cause contact failure and disable normal operation of the
controller.
1A P24
2A N
3A PC1
4A PC2
5A PC4
6A PC8
7A MODE
8A *STP/JOG +
9A CSTR/PWRT
10A HOME
11A SON
12A RES/JOG -
13A
1B
2B
3B PM1
4B PM2
5B PM4
6B PM8
7B MODES
8B MOVE
9B PEND/WEND
10B HEND
11B *EMGS Available on “RCP2-C.” Not used on “RCP2-CG.”
12B SRDY
13B *ALM
Brown 1
Red 1
Orange 1
Yellow 1
Green 1
Blue 1
Purple 1
Gray 1
White 1
Black 1
Brown 2
Red 2
Orange 2
Yellow 2
Green 2
Blue 2
Purple 2
Gray 2
White 2
Black 2
Brown 3
Red 3
Orange 3
Yellow 3
Green 3
Blue 3
Controller end
PIO (signal abbreviation)
Output side
+24 [V]
0 [V]
Command position 1
Command position 2
Command position 4
Command position 8
Operation mode
Pause/+Jog
Start/Position write
Home return
Servo ON
Reset/–Jog
Completed position 1
Completed position 2
Completed position 4
Completed position 8
Current operation
mode
Moving
Position complete/
Write completion
Home return
completion
Emergency stop
Ready
Alarm
Input side
Upper
stage
Lower
stage
(Note) *STP, *ALM and *EMGS are based on the negative logic.
Host system <PLC> end
13A
13B
1A
1B
Lower stage
Upper stage

 Loading...
Loading...





