53
6.2 Explanation of Modes
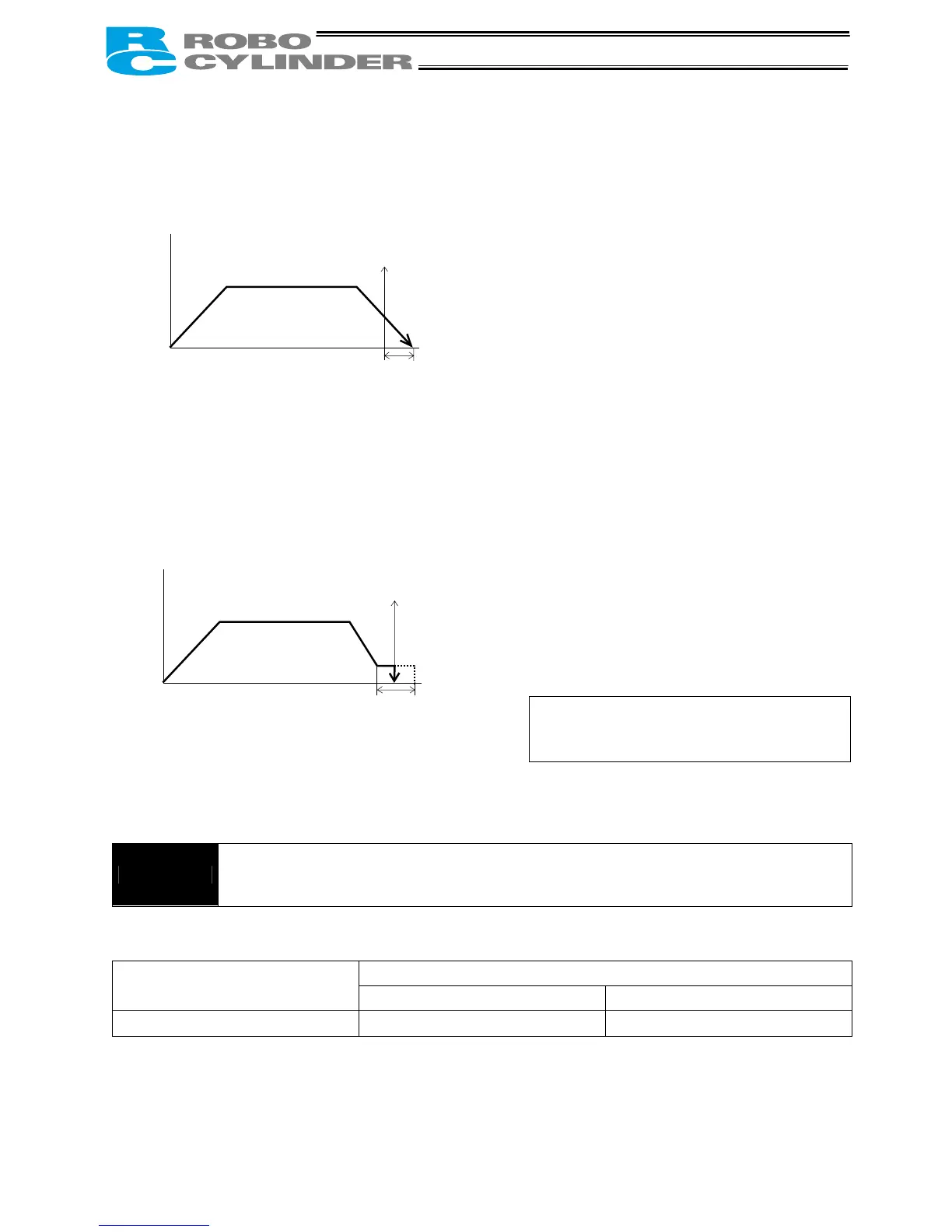
6.2.1 Positioning Mode Push = 0
6.2.2 Push & Hold Mode Push = Other than 0
(1) Load was contacted successfully
(1) After reaching the target position, the
actuator will move at low speed (75
rpms).
When the Pos. band set in the data table
(see Note) is reached after the actuator
contacts the load and the stepper motor
current has reached the current-limiting
value, the position complete output will
turn ON. A completed position number
signal will be output at the same time.
Note: Set the parameter “Push & hold stop
judgment period.” The default value of
“255 [msec]” is already entered.
The actuator is holding the load in
position while pushing it.
Warning
The actuator continues to push the load at the push force at standstill determined by the
current-limiting value. Since the actuator is not inactive, exercise due caution when
handling the machine in this condition.
The push speed is set as follows in accordance with the speed set in the position-data table:
Set speed
20 mm/sec or more Less than 20 mm/sec
Push speed 20 mm/sec Set speed
Position complete signal
Completed position number
Output
(1) The position complete output will turn
ON at a position preceding the target
position by the positioning band. A
completed position number signal will be
output at the same time.
Speed
Moving distance
Positioning band
Position complete signal
Completed position number
Output
Speed
Moving distance
Positioning band

 Loading...
Loading...





