83
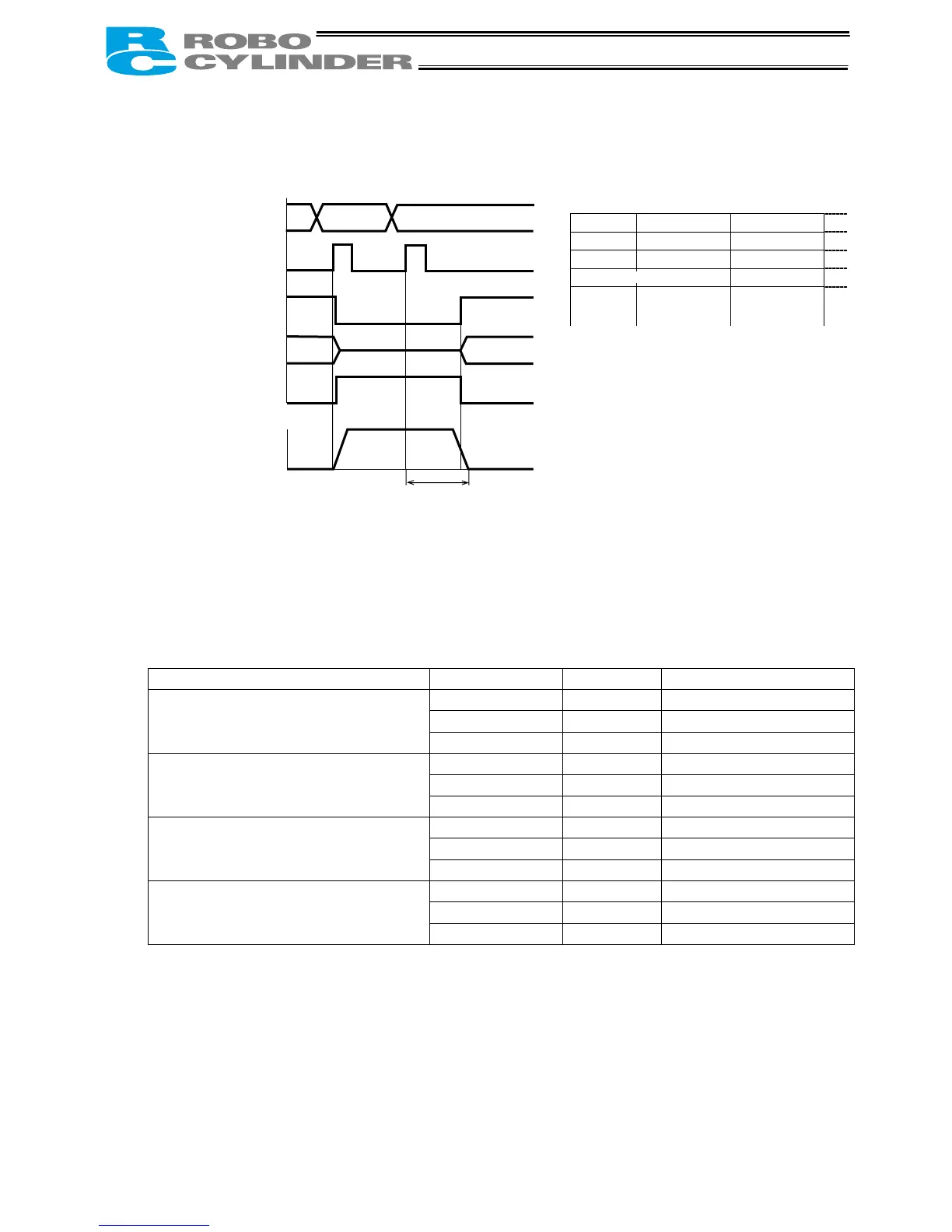
Example) If the start signal for movement to position 2 is input while the actuator is moving to
position 1 in the push & hold mode, the actuator will move to the position 10 mm from
where it was when the input signal was input.
No. Position Speed
0 * *
1 50 100
2
10 100
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
(3) Cumulative errors due to repeated incremental moves
Position data is recognized only as a multiple of the minimum resolution. The minimum resolution is
determined by the lead and the number of encoder pulses. Therefore, a margin of error may occur
between the entered position value and the actual movement of the actuator. If an incremental move
is repeated, this error will accumulate.
The maximum error range for each actuator type is shown below:
RC model Speed type Lead [mm] Maximum error range [mm]
Low speed 3 0.00375
Medium speed 6 0.0075
RCP2 -SA5
-SA6
-SS (R)
High speed 12 0.015
Low speed 5 0.00625
Medium speed 10 0.0125
RCP2 -SM
-SMR
High speed 20 0.025
Low speed 2.5 0.003125
Medium speed 5 0.00625
RCP2 -RSA
-RXA
High speed 10 0.0125
Low speed 4 0.005
Medium speed 8 0.01
RCP2 -RMA
-SA7
High speed 16 0.02
Example) If an incremental move is repeated 10 times on a RCP2-SM high-speed controller, a
maximum error of 0.025 x 10 = 0.25 [mm] may generate with respect to the final
position.
To eliminate these cumulative errors, an absolute command must be executed before the error
tolerance is exceeded.
(4) Ball screw accuracy
The accuracy of the ball screw used in the RCP2 conforms to C10 under the JIS standard.
=
Distance
10 mm
Command position
Start
Position complete
Completed position
Actuator movement
Speed
Position 1 Position 2
Position 2

 Loading...
Loading...





