3. Operation
Fieldbus Communication
109
RCP6
(ON = Applicable bit is “1”, OFF = Applicable bit is “0”)
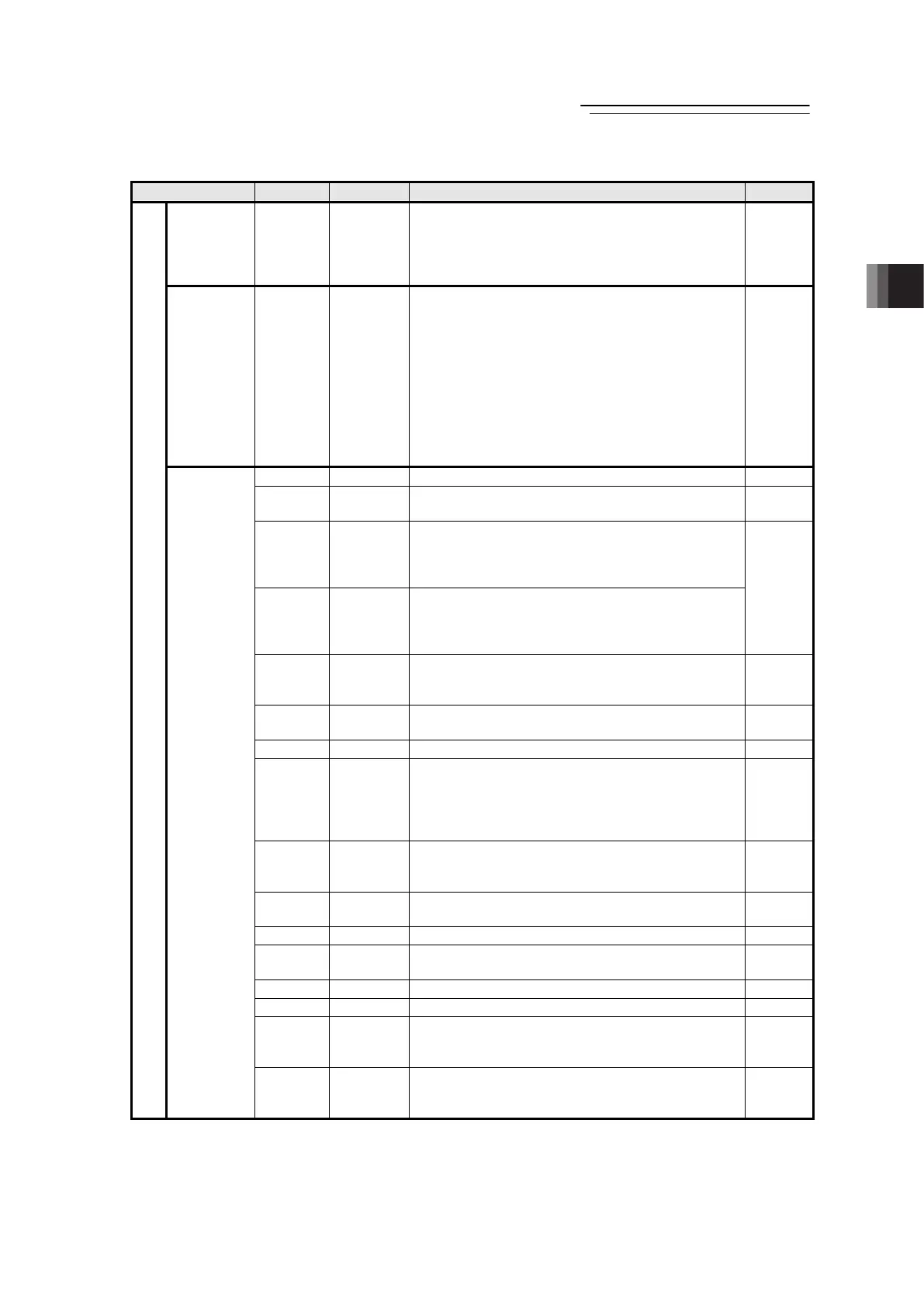
Signal Type Bit Symbol Description Details
Current
Position
32 bits –
32-bit signed integer indicating the current position
Unit: 0.01mm
(Example) If +10.23mm, input 000003FF
H
(1023 in
decimal system).
(Note) Negative numbers are two’s implement.
3.7.2
Completed
Position No.
(Simple
Alarm Code)
16 bits
PM1 to
PM512
16-bit integer
The positioning complete position number is output
in a binary number once getting into the positioning
width after moving to the target position.
In the case that the position movement has not been
performed at all, or during the movement, “0” is
output. Read it by turning PEND Signal ON after
movement.
The simple alarm code (refer to Chapter 9
Troubleshooting) is output while an alarm is issued
(ALM of Status Signal is ON).
3.7.2
b15 EMGS This signal turns ON during an emergency stop 3.7.1 [2]
b14 CRDY
This signal turns ON when the controller is standing
by.
3.7.1 [1]
b13 ZONE2
“ON” for the current position within the zone 2 set
range
The zone range setting is necessary for the
parameter.
b12 ZONE1
“ON” for the current position within the zone 1 set
range
The zone range setting is necessary for the
parameter.
3.7.1 [9]
b11 PZONE
Position zone
This signal turns ON when the current position is
inside the specified position zone.
3.7.1 [9]
b10 MODES
This signal is ON while the teaching mode is
selected.
3.7.1 [13]
b9 WEND This signal turns ON when reading is complete. 3.7.1 [14]
b8 MEND
This signal turns ON at either of positioning complete
of after movement, home return complete or pressing
complete or pressing failure, and turns OFF at
movement start.
It is OFF when the servo is OFF.
3.7.1 [19]
b7 ALML
Light error alarm output
It turns ON when an overload warning or message
level error is issued.
3.7.1 [21]
b6 LOAD
Load Output Judgment:
turns on when achieved and off when unachieved
3.7.1 [22]
b5 PSFL “ON” for pressing and a miss 3.7.1 [18]
b4 SV
This signal turns ON when operation standby is
complete (Servo is ON).
3.7.1 [5]
b3 ALM This signal is ON while an alarm is generated. 3.7.1 [3]
b2 MOVE This signal is ON while in movement. 3.7.1 [7]
b1 HEND
This signal turns ON at home return complete and is
kept unless the home position is lost due to a fact
such as an alarm.
3.7.1 [6]
PLC Input
Status
Signal
b0 PEND
This signal turns ON at positioning complete and is
kept ON during a stop with the servo ON, but does
not turn ON when pressing operation is failed.
3.7.1 [7]
3.4.4

 Loading...
Loading...