3. Operation
Fieldbus Communication
123
RCP6
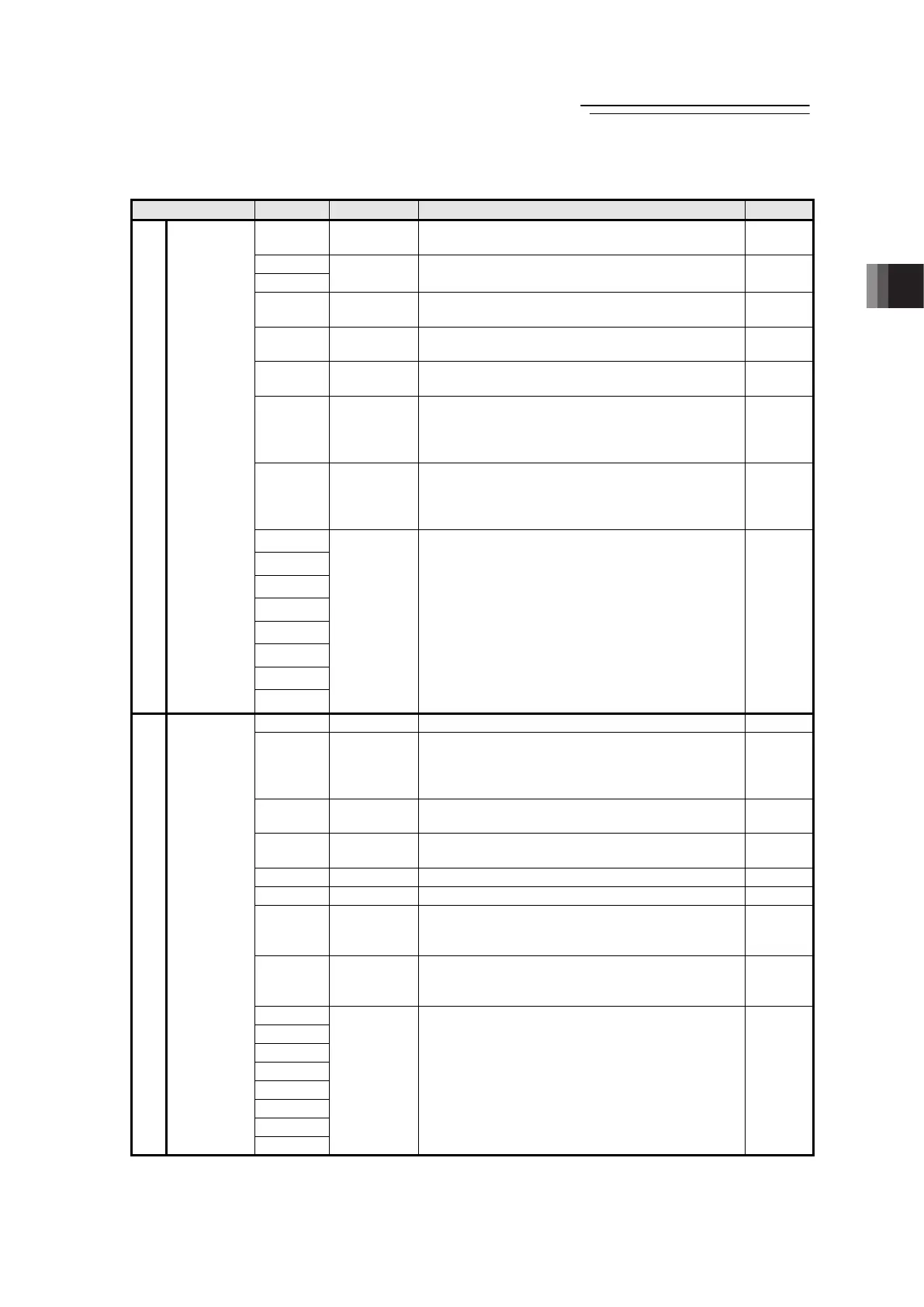
(3) I/O signal assignment
(ON = Applicable bit is “1”, OFF = Applicable bit is “0”)
Signal Type Bit Symbol Description Details
b15 BKRL
Brake release
ON: Brake release, OFF: Brake activated
3.7.1 [15]
b14
b13
– Cannot be used. –
b12 SON
Servo ON command
ON: Servo ON, OFF: Servo OFF
3.7.1 [5]
b11 RES
Reset
A reset is performed when this signal turns ON.
3.7.1 [4]
b10 STP
Pause
ON: Pause, OFF: Pause release
3.7.1 [8]
b9 HOME
Home return
Home-return command with this signal ON,
command carried on till complete even if the signal
is turned OFF on the way
3.7.1 [6]
b8 CSTR
Positioning start
Movement command executed with this signal ON,
command carried on till complete even if the signal
is turned OFF on the way
3.7.1 [1]
b7
b6
b5
b4
b3
b2
b1
PLC Output
Control
Signal/
Specified
Position No.
b0
PC1 to
PC128
Command position No. (8 bits binary data)
Available range for Setting: 0 to 255
To operate, it is necessary to have the position data
that the operation conditions are already set in
advance with a teaching tool such as the PC
software.
In this register, indicate the position number the
data is input with a binary number.
Indicating a value out of the range or operating with
a position number with no setting conducted will
generate the alarm code 0A2 “Position Data Error”.
3.7.4
b15 EMGS This signal turns ON during an emergency stop 3.7.1 [2]
b14 ZONE1
“ON” for the current position within the zone 1 set
range
The zone range setting is necessary for the
parameter.
3.7.1 [9]
b13 PSFL
This signal turns ON when the actuator missed the
load in push-motion operation.
3.7.1 [18]
b12 SV
This signal turns ON when operation standby is
complete (Servo is ON).
3.7.1 [5]
b11 ALM This signal is ON while an alarm is generated. 3.7.1 [3]
b10 MOVE This signal is ON while in movement. 3.7.1 [7]
b9 HEND
This signal turns ON at home return complete and
is kept unless the home position is lost due to a fact
such as an alarm.
3.7.1 [6]
b8 PEND
This signal turns ON at positioning complete and is
kept ON during a stop with the servo ON, but does
not turn ON when pressing operation is failed.
3.7.1 [7]
b7
b6
b5
b4
b3
b2
b1
PLC Input
Status
Signal/
Completed
Position No.
b0
PM1 to
PM128
Completed position No. (8 bits binary data)
The positioning complete position number is output
in a binary number once getting into the positioning
width after moving to the target position.
In the case that the position movement has not
been performed at all, or during the movement, “0”
is output. Read it by turning PEND Signal ON after
movement.
3.7.4
3.4.7

 Loading...
Loading...