3. Operation
Fieldbus Communication
144
RCP6
[21] Light error alarm (ALML) PLC Input Signal
This signal turns ON when an overload warning or message level alarm is generated.
[Refer to 8.2 [62] Light Malfunction Alarm Output Select]
For the message level alarm, refer to the section for the Chapter 9 Troubleshooting.
[22] Outputs load output judgment (LOAD) PLC Input Signal
This signal is valid only in pressing operation.
In order to use it in press-fitting purpose, it is necessary to know if the load has reached the set
load threshold during the pressing operation.
The load threshold and the inspection band range are to be set in the PLC, and this signal turns
on when the command torque (motor current) exceeded the threshold in this inspection band
range.
This signal makes a judgment by checking if the command torque exceeds the threshold for a
certain time in total.
The process order is the same as that for pressing judgment. The judgment time for load output
can be changed if necessary in Parameter No. 50 “Load Output Judgment Time”.
This signal will be retained until the next movement command is received.
• The pressing velocity is set in Parameter No. 34.
Setting is established individually considering the actuator characteristics at the delivery.
Indicate appropriate velocity considering the material and profile of the work piece.
• Set the parameter No.50 [Outputs load output judgment time]
• The threshold inspection band is to be set in Zone Boundary + Register and Zone Boundary –
Register in PLC.
• The threshold is to be set in Load Current Threshold Register in PLC.
• The positioning band is to be set in Positioning Band Register in PLC.
Set it a little longer than the position of the end portion considering mechanical unevenness
of a work piece.
Refer to an instruction manual for main unit of controller for details
Caution
:
•
Servo error will occur if hitting to a work piece in front of the target position.
Consider the relation between the target position and the work piece
position.
•
The actuator keeps pushing a work piece with the pressing current at stop
determined by the current limit value.
Be careful in handling at this time as it is not the status of stop.
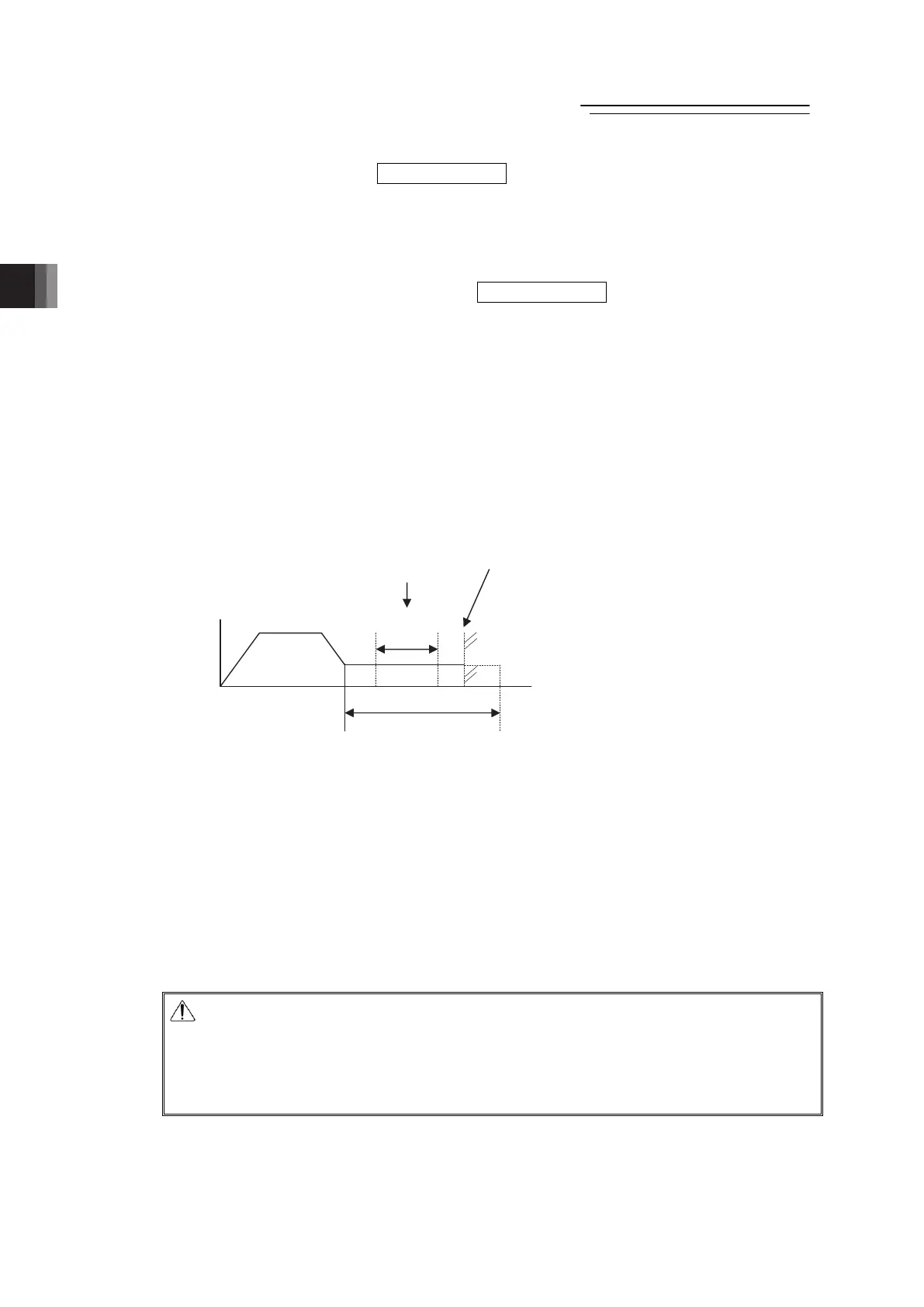
Velocity
Target position
Movement
distance
Positioning band (Max pressing volume)
Inspection band
range
The position where this signal turns on if
the command torque exceeded the
threshold in the torque inspection range
The position where positioning complete
signal turns ON if the work piece hits and
pressing is judged as completed.
3.7.1

 Loading...
Loading...