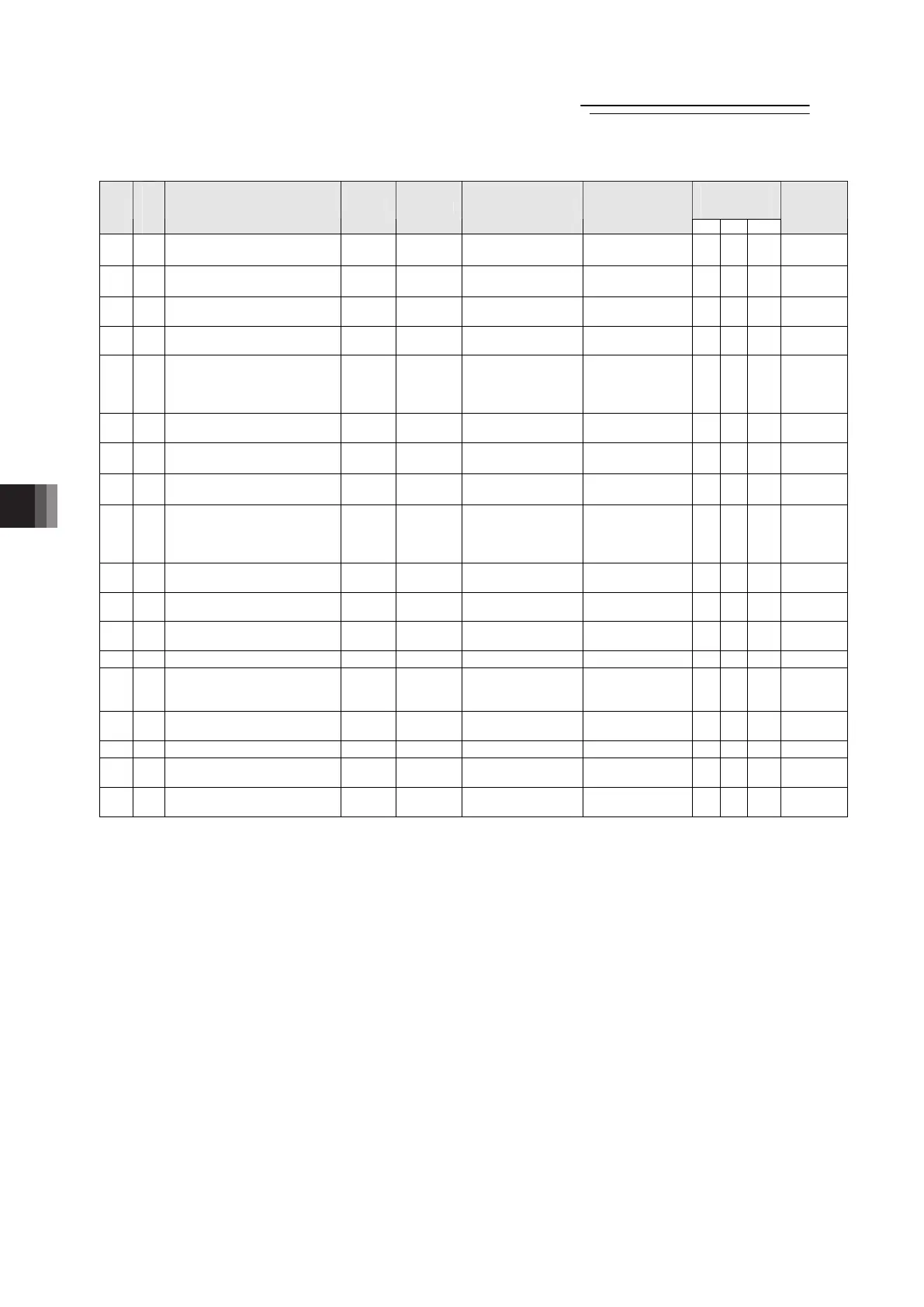
8. Parameter
Fieldbus Communication
190
RCP6
Parameter List (5/5)
Applicable
Controller
(Note 3)
No.
Category
Name Symbol Unit
(Note 1)
Input Range
Default factory
setting
A P D
Relevant
sections
145 C
GS Velocity Loop
Proportional Gain
GSPC - 1 to 50000
In accordance with
actuator
(Note 2)
-
○ -
8.2 [58]
8.2 [21]
146 C
GS Velocity Loop Integral
Gain
GSIC - 1 to 500000
In accordance with
actuator
(Note 2)
-
○ -
8.2 [59]
8.2 [22]
147 B
Total Movement Count
Threshold
TMCT Times 0 to 999999999 0 (Disabled) ○ ○ ○ 8.2 [60]
148 B
Total Operated Distance
Threshold
ODOT m 0 to 999999999 0 (Disabled) ○ ○ ○ 8.2 [61]
151 B
Light Malfunction Alarm
Output Select
FSTP -
0: Overload
warning output
1: Message lebel
alarm output
1 ○ ○ ○ 8.2 [62]
152 B High Output Setting BUEN -
0: Disabled
1: Enabled
In accordance
with actuator
(Note 2)
-
○ - 8.2 [63]
153 B
BU Velocity Loop Proportional
Gain
BUPC - 1 to 27661
In accordance with
actuator
(Note 2)
-
○ -
8.2 [64]
8.2 [21]
154 B
BU Velocity Loop Integral
Gain
BUIC - 1 to 217270
In accordance with
actuator
(Note 2)
-
○ -
8.2 [65]
8.2 [22]
155 A
Absolute Battery Retention
Time
AIP -
0: 20 days
1: 15 days
2: 10 days
3: 5 days
0 ○
(Note 4)
△
-
8.2 [66]
7.2.2
165 B
Delay Time after Shutdown
Release
SDDT msec 0 to 1000 0 ○ ○ ○ 8.2 [67]
166 B
Startup Current Limit
Extension Feature
DCET -
0: Disabled
1: Enabled
In accordance
with actuator
(Note 2)
-
○ - 8.2 [68]
168 B Collision Detection Feature CODT - 0 to 7 0 - ○ -
8.2 [69]
5.2
169 B SIO2 Baud Rate Select BRS2 bps 9600 to 230400 38400 ○ ○ ○ 8.2 [70]
170 B
SIO2 Slave Station
Transmitter Activating
Minimum Delay Time
RTM2 msec 0 to 255 5 ○ ○ ○ 8.2 [71]
171 B
SIO2 Silent Interval
Multiplying Factor
SIM2 - 0 to 10 0 ○ ○ ○ 8.2 [72]
172 B SIO2 Slave Address MSA2 - 1 to 16 1 ○ ○ ○ 8.2 [73]
181 B Pressing Method SPOS
0: CON type
1: SEP type
0 ○ ○ ○ 8.2 [74]
182 B Auto Current Adj. Select ACDS
0: Disabled
1: Enabled
0 - ○ -
8.2 [75]
6.2
Note 1 The unit [deg] is for rotary actuator and lever type gripper. It is displayed in [mm] in the teaching tools.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipment, the
parameters are set in accordance with the specification.
Note 3
A: RCM-P6AC, P: RCP6S and RCM-P6PC, D: RCM-P6DC
Note 4
△: For RCM-P6PC only

 Loading...
Loading...