8. Parameter
Fieldbus Communication
199
RCP6
[21] Velocity loop proportional gain (Parameter No.31)
No. Name Symbol Unit Input Range
Default factory
setting
31 Velocity Loop Proportional Gain VLPG - 1 to 27661
In accordance
with actuator
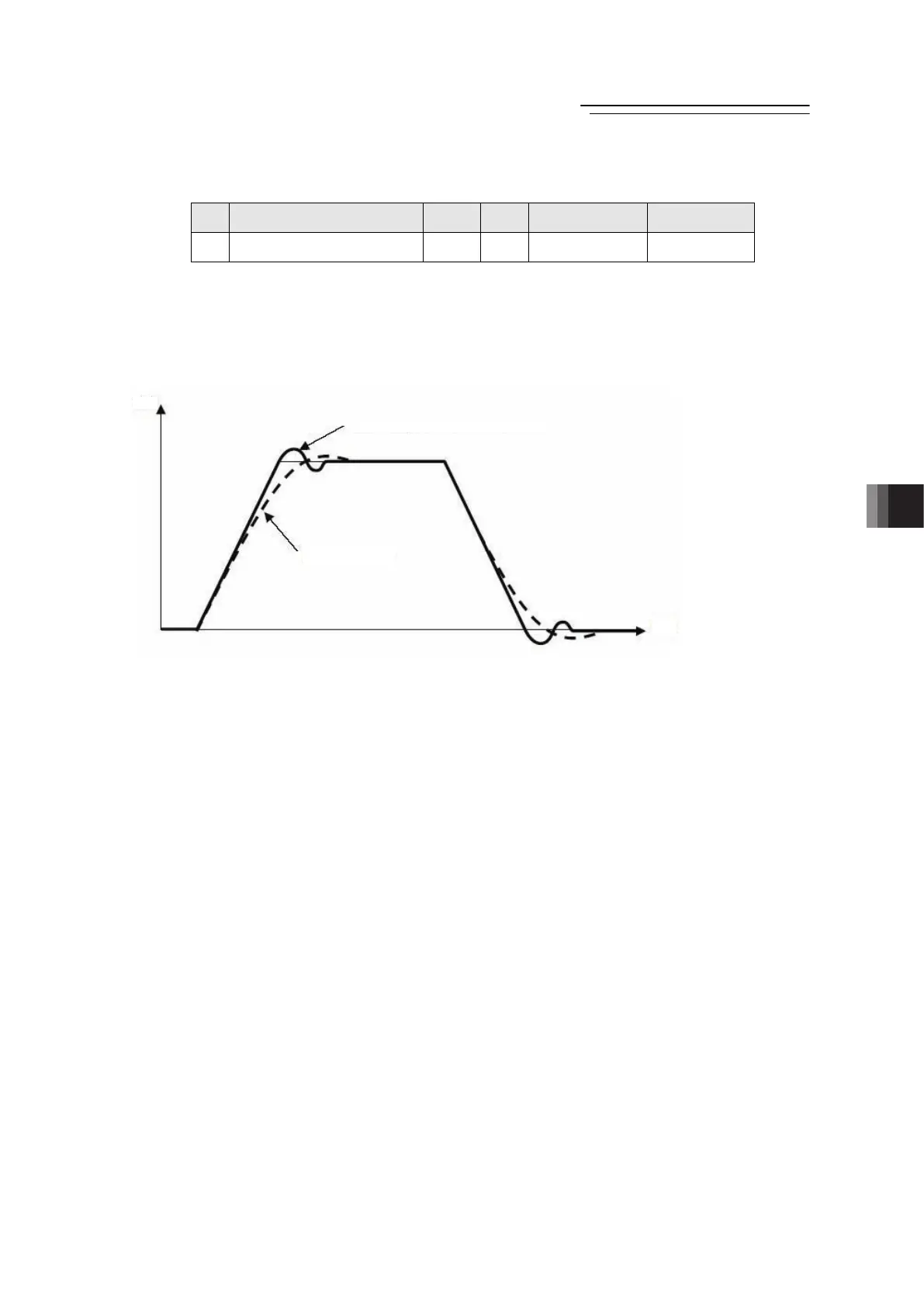
This parameter determines the response of the speed control loop. When the set value is
increased, the follow-up ability to the velocity command becomes better (the servo-motor
rigidity is enhanced). The higher the load inertia becomes, the larger the value should be set.
However, excessively increasing the setting will cause overshooting or oscillation, which
facilitates producing the vibrations of the mechanical system.
When the set value is low
When the set value is high (over-shoot)
Velocity
Time
Also, for the conditions to use this item in RCP6S and RCM-P6PC, refer to “Selecting to Use
Velocity Loop Proportional Gain and Velocity Loop Integrated Gain” in the bottom of the next page.

 Loading...
Loading...