8. Parameter
Fieldbus Communication
207
RCP6
[40] Position Feed forward gain (Parameter No.71)
No. Name Symbol Unit Input Range
Default
factory setting
Model
0
RCP6S
RCM-P6PC
RCM-P6AC
71
Position Feed Forward
Gain
PLFG - 0 to 100
50
RCM-P6DC
This parameter defines the level of feed forward gain to be applied to position control.
Setting this parameter allows the servo gain to be increased and the response of the position
control loop to be improved. This is the parameter to improve the takt time and traceability even
more after fine-tuning the settings for “Servo Gain Number (Parameter No.7)”, “Velocity Loop
Proportional Gain (Parameter No.31)”, etc.
This can result in shorter positioning time.
The gain adjustment of position, speed and current loop in feedback control can directly
change the response of the servo control system. Thus, improper adjustment may cause the
control system to be unstable and further vibrations and/or noises to occur. On the other hand,
since this parameter only changes the speed command value and does not relate with the
servo loop, it neither makes the control system unstable nor generate continuous vibrations
and/or noises. However, excessive setting may generate vibrations and/or noises until the
machine can follow command values in every operation.
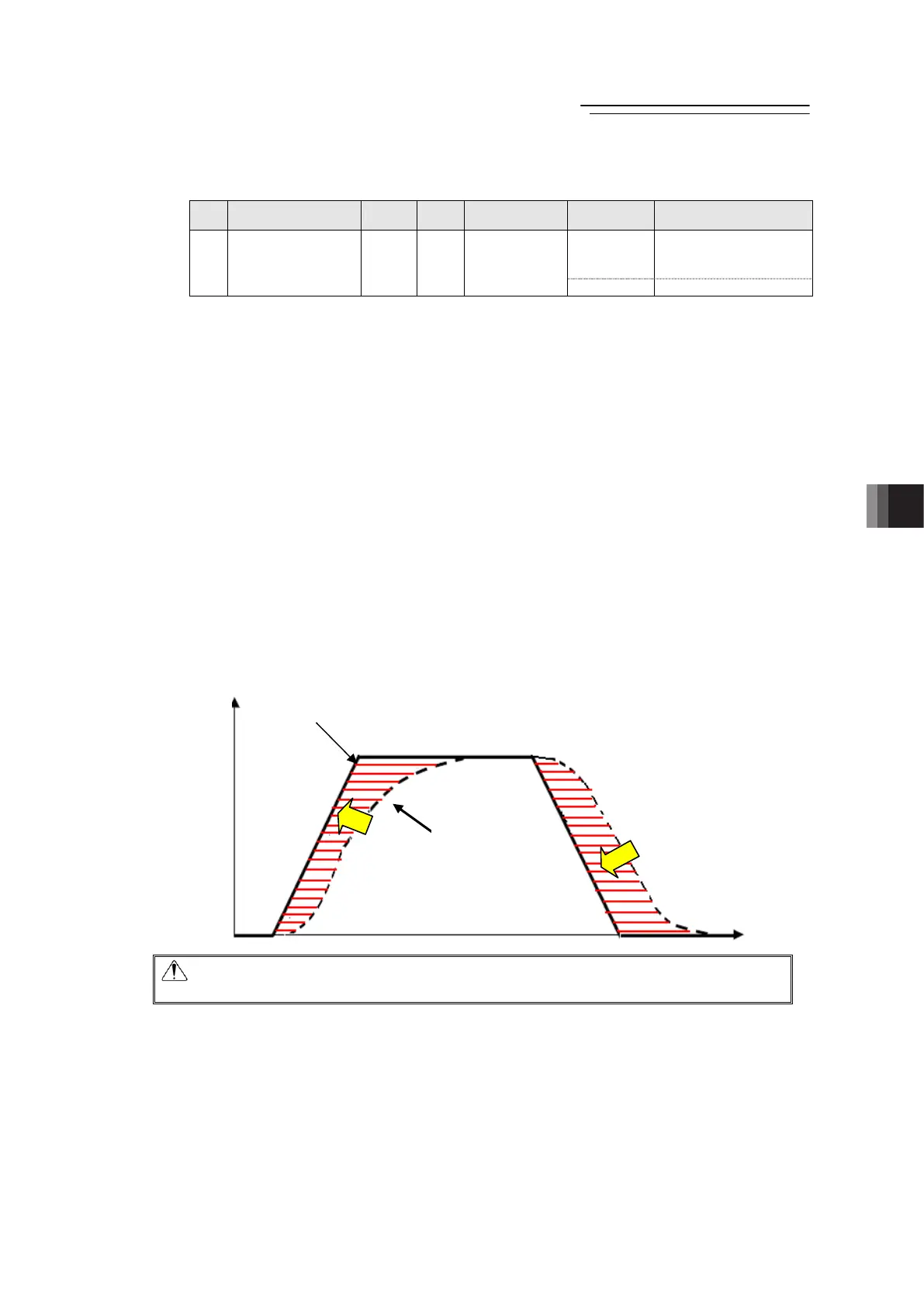
In the trapezoidal pattern, adding the value resulting from multiplying the speed command by
the feed forward gain to the speed command can reduce the delay of speed follow-up and the
position deviation.
The feedback control providing control in accordance with the result causes control delay to
occur. This conducts the supportive control independent from the control delay.
Caution: Anti-vibration control function is unavailable when the feed-forward gain is
used (with the settings except for 0).
Actual velocity
Velocity command value (trapezoidal pattern)
Velocity
Time

 Loading...
Loading...