8. Parameter
Fieldbus Communication
213
RCP6
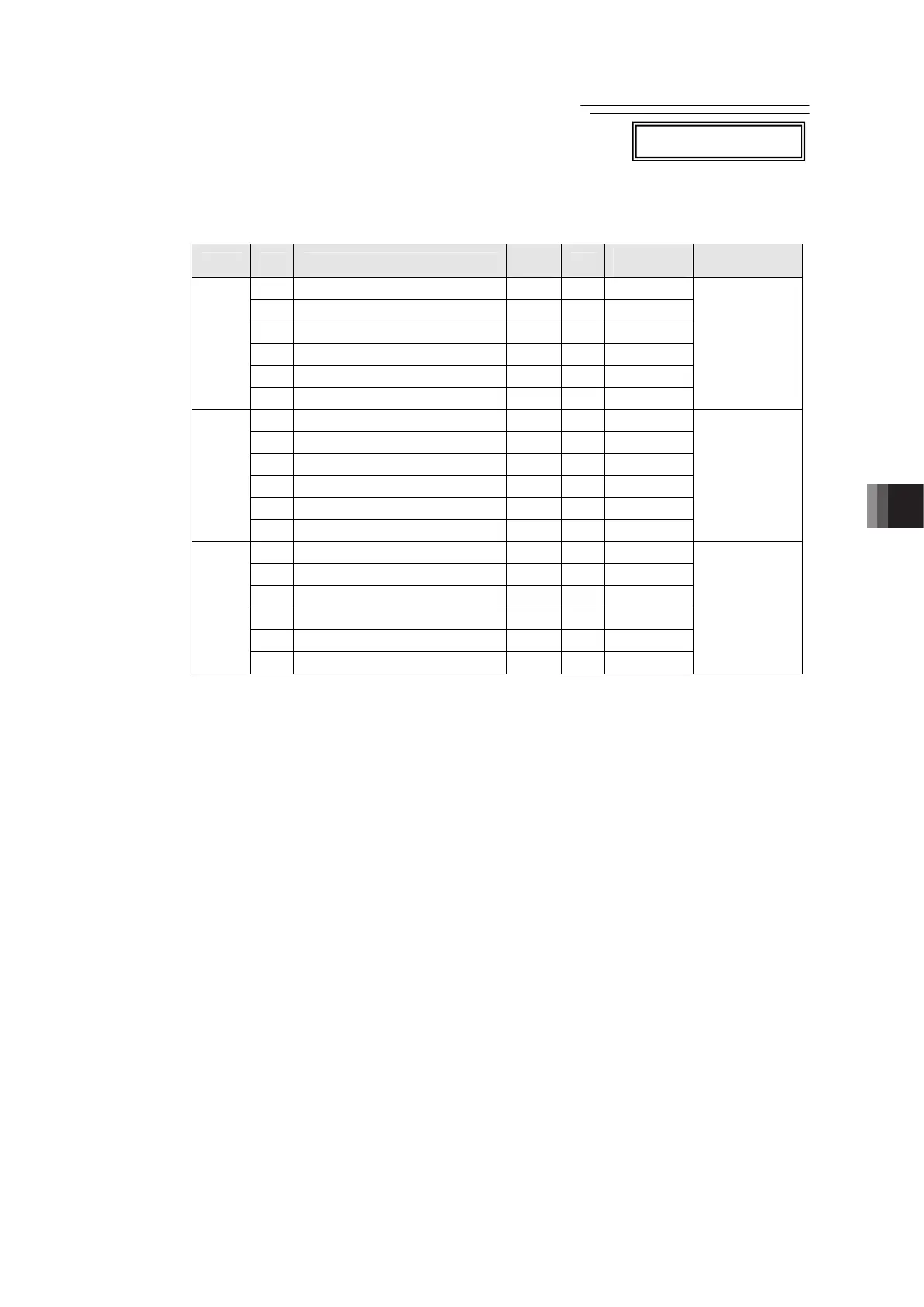
[53] Servo gain number / Position Feed forward gain / Velocity loop proportional gain /
Velosity loop integral gain / Torque filter time constant / Current control width number
(Parameter No.120 to 137)
No. Name
Symb
ol
Unit
Input
Range
Default factory
setting
120 Servo gain number 1 PLG1 - 0 to 31
121 Position Feed forward gain 1 PLF1 - 0 to 100
122 Velocity loop proportional gain 1 VLG1 - 1 to 27661
123 Velosity loop integral gain 1 VLT1 - 1 to 217270
124 Torque filter time constant 1 TRF1 - 0 to 2500
Gain
set 1
125 Current control width number 1 CLP1 - 0 to 15
In accordance
with actuator
126 Servo gain number 2 PLG2 - 0 to 31
127 Position Feed forward gain 2 PLF2 - 0 to 100
128 Velocity loop proportional gain 2 VLG2 - 1 to 27661
129 Velosity loop integral gain 2 VLT2 - 1 to 217270
130 Torque filter time constant 2 TRF2 - 0 to 2500
Gain
set 2
131 Current control width number 2 CLP2 - 0 to 15
In accordance
with actuator
132 Servo gain number 3 PLG3 - 0 to 31
133 Position Feed forward gain 3 PLF3 - 0 to 100
134 Velocity loop proportional gain 3 VLG3 - 1 to 27661
135 Velosity loop integral gain 3 VLT3 - 1 to 217270
136 Torque filter time constant 3 TRF3 - 0 to 2500
Gain
set 3
137 Current control width number 3 CLP3 - 0 to 15
In accordance
with actuator
x Servo gain number 1/2/3 (Parameter No. 120, 126, 132)
This parameter determines the response of the position control loop.
[Refer to 8.2 [5] Servo gain number.]
x Position Feed forward gain 1/2/3 (Parameter No. 121, 127, 133)
This parameter defines the feed forward gain of the position control system.
[Refer to 8.2 [40] Position Feed forward gain.]
x Velocity loop proportional gain 1/2/3 (Parameter No. 122, 128, 134)
This parameter determines the response of the speed control loop.
[Refer to 8.2 [21] Velocity loop proportional gain.]
x Velosity loop integral gain 1/2/3 (Parameter No. 123, 129, 135)
This parameter determines the response of the speed control loop.
[Refer to 8.2 [22] Velosity loop integral gain.]
x Torque filter time constant 1/2/3 (Parameter No. 124, 130, 136)
This parameter decides the filter time constant for the torque command.
[Refer to 8.2 [23] Torque filter time constant.]
x Current control width number 1/2/3 (Parameter No. 125, 131, 137)
This parameter defines the control width of the current control system.
[Refer to 8.2 [37] Current control width number.]
[Reference Item] 3.3 Position Data Setting 13)-2 Gain Set
For RCM-P6AC only

 Loading...
Loading...