Goodrive300-LIFT series inverter Commissioning guidelines
-79-
7.4 Debugging running
After parameters are correctly set, debug running, including adjusting motor parameter autotuning,
maintenance running, S curve for normal running, comfortability at startup or stop, and lift leveling
accuracy.
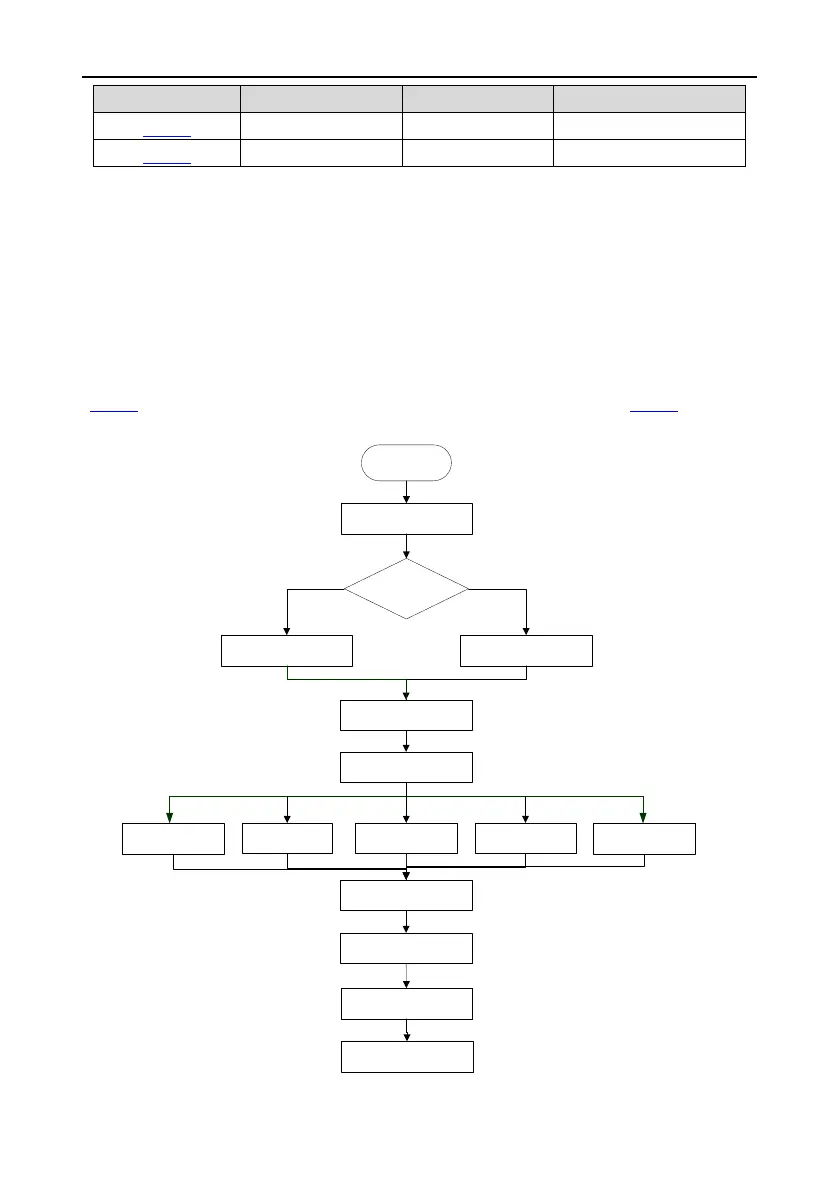
7.4.1 Motor parameter autotuning
The control performance of the inverter is based on the established accurate motor model. You have
to carry out the motor autotune before first running. Set the inverter to use the keypad control mode
(P00.01=0), and execute parameter autotuning by using the method described in P00.09. The figure
below describes the autotuning process which takes motor 1 for example.
Start
P00.01=0
Motor type
(P02.00)
P02.00=1 P02.00=0
Enter the motor name plate.
(P02.01~P02.05)
P00.09=2 P00.09=4
Set the autotuning mode.
(P00.09)
Press “RUN”to start
autotuning.
Display “-END-”
Autotuning
Synchronous
motor
Asynchronous
motor
End
P00.09=3
P00.09=5P00.09=1
Figure 7-4 Motor parameter autotuning
 Loading...
Loading...
