Goodrive30 Series VFD Function parameter list
-58-
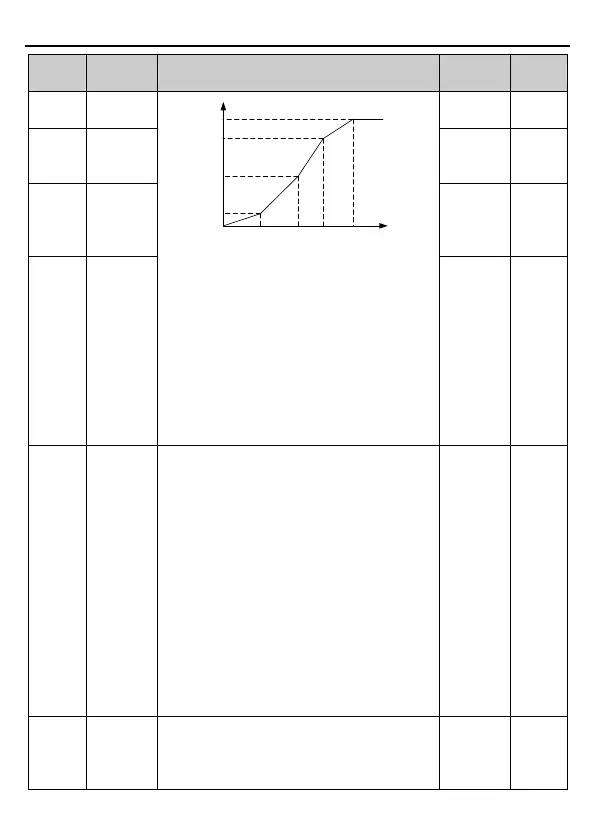
Output voltage
f1
f2
f3
V1
V2
V3
Setting range of P04.03: 0.00Hz –P04.05
Setting range of P04.04: 0.0%–110.0% (of rated
voltage of motor 1)
Setting range of P04.05: P04.03 –P04.07
Setting range of P04.06: 0.0%–110.0% (of rated
voltage of motor 1)
Setting range of P04.07: P04.05–P02.02 (rated
frequency of motor 1) or P04.05– P02.16 (rated
frequency of motor 1)
Setting range of P04.08: 0.0%–110.0% (of rated
voltage of motor 1)
V/F voltage
point 2 of
motor 1
V/F
frequency
point 3 of
motor 1
V/F voltage
point 3 of
motor 1
V/F slip
compensati
on gain of
motor 1
The function code is used to compensate for the
motor rotating speed change caused by load
change in the space voltage vector mode, and
thus improve the rigidity of the mechanical
characteristics of the motor. You need to
calculate the rated slip frequency of the motor as
follows:
△f=f
b
-n*p/60
Of which, f
b
is the rated frequency of the motor,
corresponding to function code P02.02. n is the
rated rotating speed of the motor, corresponding
to function code P02.03. p is the number of pole
pairs of the motor. 100.0% corresponds to the
rated slip frequency △f of motor.
Setting range: 0.0–200.0%
Low
frequency
vibration
control
In space voltage vector control mode, the motor,
especially the large-power motor, may
experience current oscillation at certain
frequencies, which may cause unstable motor

 Loading...
Loading...







