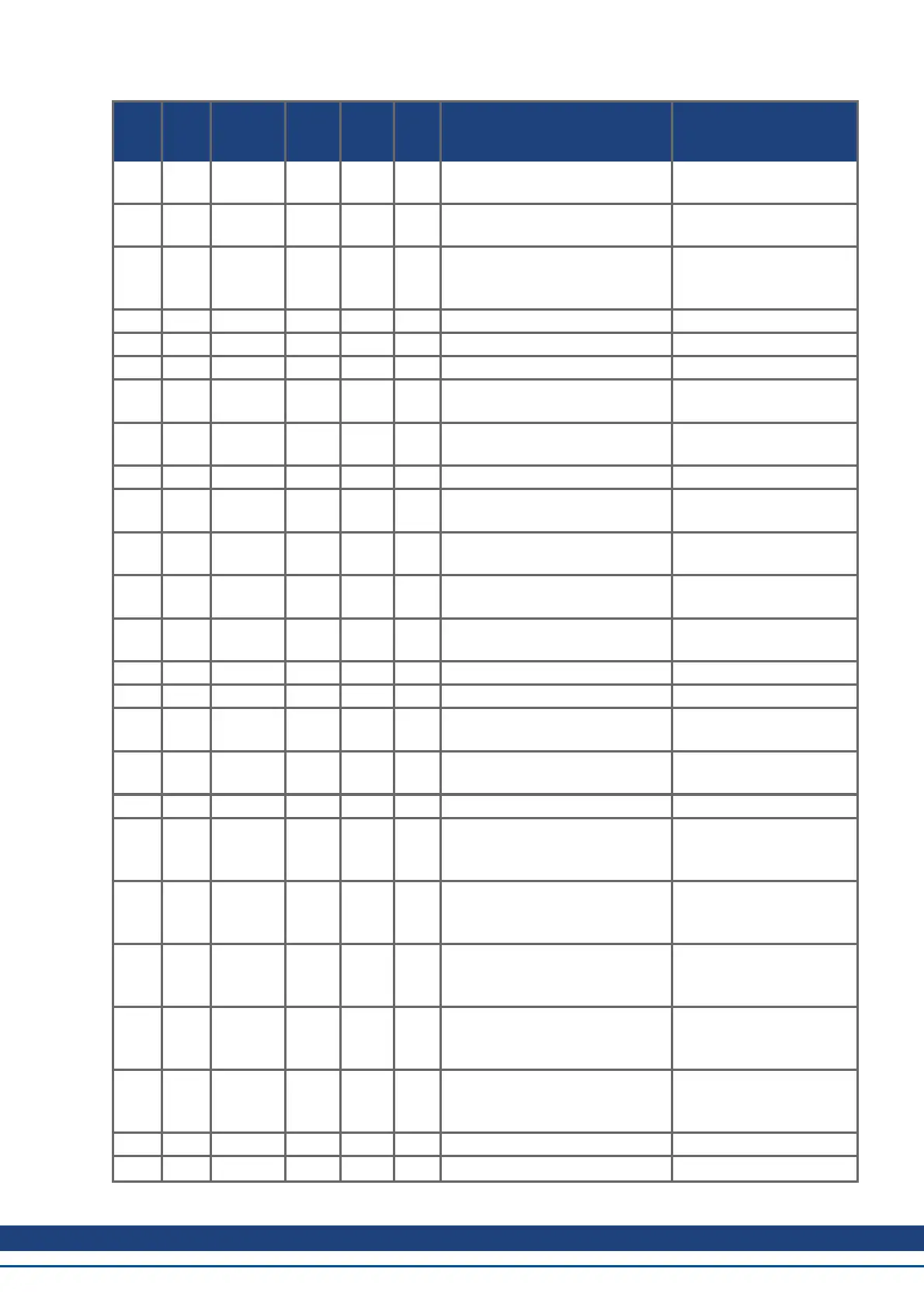
Index Sub-
index
DataType Float
Scal-
ing
Acces-
s
PDO
map-
p.
Description ASCII object
3482h 0 INT32 1:1 RO no Maximum value of following error
in homing
HOME.PERRTHRESH
3483h 0 INT32 1:1 RW no Sets the position error warning
level
PL.ERRWTHRESH
3484h 0 INT32 1:1 RW no Specification of an additional
movement after homing is com-
pleted.
HOME.DIST
3490h 0 INT32 1:1 RO no Position feedback offset FB1.POFFSET
3491h 0 U32 RO no Location of index pulse on EEO DRV.EMUEMTURN
3492h 0 U32 RO no Motion status of the drive DRV.MOTIONSTAT
3493h 0 U8 RO no Direction of EEO (emulated
encoder output)
DRV.EMUEDIR
3494h REC-
ORD
WS parameters —
3494h 0 U8 RO no Number of entries —
3494h 1 INT16 1000:1 RW no Sets maximum current used for
wake and shake
WS.IMAX
3494h 2 INT32 1:1 RW no Sets the maximum movement
required for wake and shake
WS.DISTMAX
3494h 3 U16 RW no Sets the delay for wake and
shake between loops in mode 0
WS.TDELAY3
3494h 4 INT32 1:1 RW no Defines the maximum allowed
velocity for Wake & Shake
WS.VTHRESH
3494h 5 U8 RO no Reads wake and shake status WS.STATE
3494h 6 U8 RW no Arm Wake and Shake to start WS.ARM
3495h 0 U16 1000:1 RW no Voltage level for undervoltage
warning.
VBUS.UVWTHRESH
3496h ARRAY FBUS synchronization param-
eters
—
3496h 0 U8 RO no Number of entries —
3496h 1 U32 RW no expected time distance between
clearing the PLL counter and call-
ing the PLL function
FBUS.SYNCDIST
3496h 2 U32 RW no actual time distance between
clearing the PLL counter and call-
ing the PLL function
FBUS.SYNCACT
3496h 3 U32 RW no Time window, which is used in
order to consider the drive as
being synchronized
FBUS.SYNCWND
3496h 4 U32 RW no Time, which is used for extending
or lowering the sample rate of the
internal 16[kHz] IRQ
—
3498h 0 U8 RW no Protection level of fieldbus
against other communication
channels (Telnet, Modbus..)
FBUS.PROTECTION
34A0h ARRAY PLS Position
34A0h 0 U8 RO no Number of entries —
AKD CANopen | 8 Appendix
Kollmorgen™ | November 2012 127

 Loading...
Loading...







