21 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
7Programming
7.1 Overview of function blocks
Information about programming RSLogix 5000 is contained in the
documentation of this software.
Only the function blocks contained in the scope of supply of KU-
KA.PLC mxAutomation Logix may be used in an mxA robot program.
The MxA_Rockwell_Sample.ACD template supplied on the USB
stick (Template folder) contains all the function blocks and a pro-
gramming example with the fundamental function blocks. It is advis-
able to use this template for creating an mxAutomation robot program.
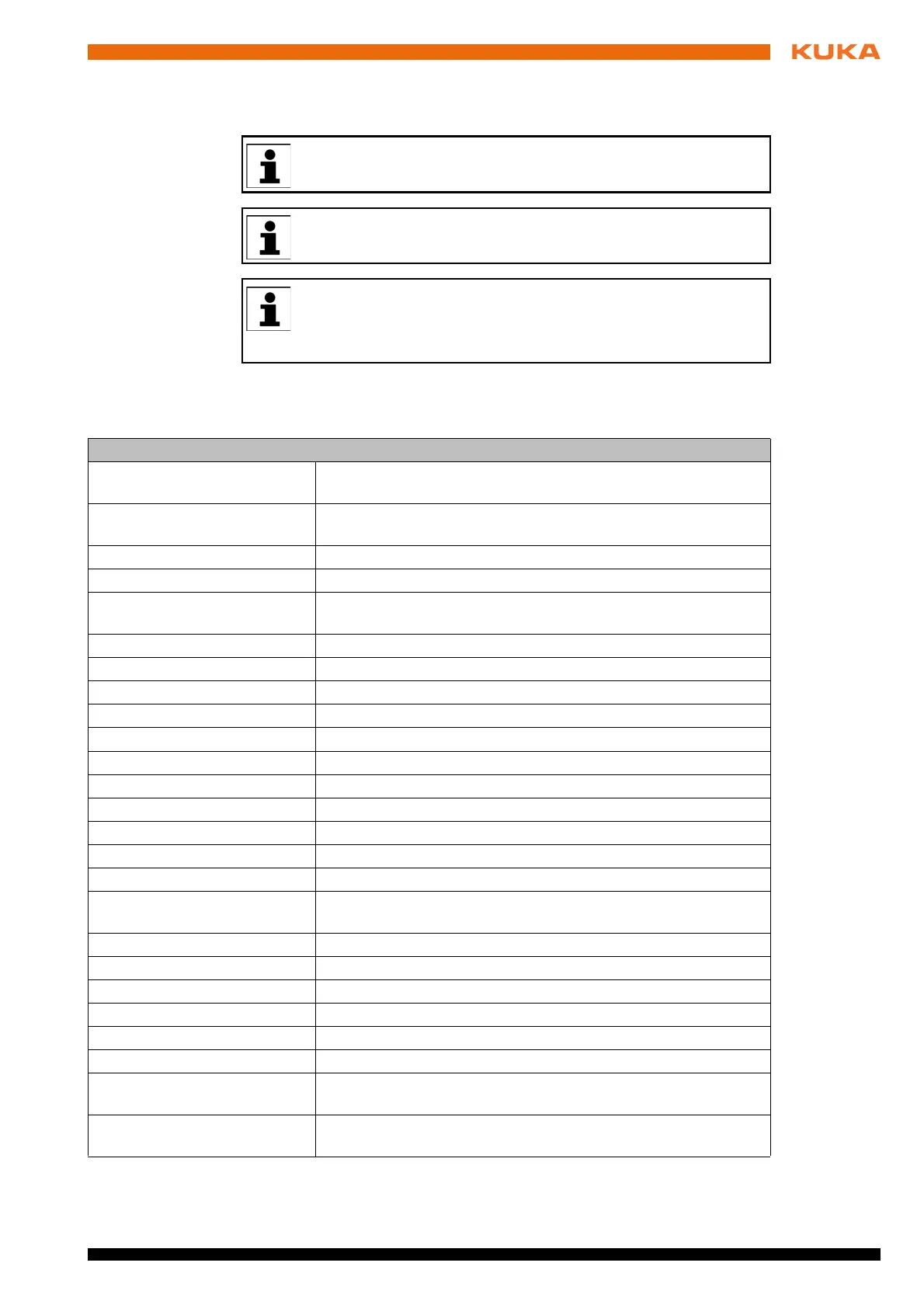
Administrative functions
KRC_ReadAxisGroup (>>> 7.6.1 "Reading PLC-specific communication into a non-
PLC-specific structure" Page 30)
KRC_WriteAxisGroup (>>> 7.6.2 "Writing a non-PLC-specific structure into PLC-spe-
cific communication" Page 31)
KRC_Initialize (>>> 7.6.3 "Initializing the mxA interface" Page 32)
KRC_SetOverride (>>> 7.6.4 "Setting the program override (POV)" Page 33)
KRC_AutomaticExternal (>>> 7.6.5 "Activating and reading Automatic External signals
from the robot controller" Page 34)
KRC_ReadActualPosition (>>> 7.6.6 "Reading the current robot position" Page 36)
KRC_ReadActualAxisPos (>>> 7.6.7 "Reading the current axis position" Page 37)
KRC_ReadActualVelocity (>>> 7.6.8 "Reading the current path velocity" Page 37)
KRC_ReadActualAxisVelocity (>>> 7.6.9 "Reading the current axis velocity" Page 38)
KRC_ReadActualAcceleration (>>> 7.6.10 "Reading the current robot acceleration" Page 39)
KRC_ReadDigitalInput (>>> 7.6.11 "Reading a digital input" Page 40)
KRC_ReadDigitalOutput (>>> 7.6.12 "Reading a digital output" Page 40)
KRC_WriteDigitalOutput (>>> 7.6.13 "Writing a digital output" Page 41)
KRC_ReadAnalogInput (>>> 7.6.14 "Reading an analog input" Page 42)
KRC_ReadAnalogOutput (>>> 7.6.15 "Reading an analog output" Page 43)
KRC_WriteAnalogOutput (>>> 7.6.16 "Writing an analog output" Page 44)
KRC_SetCoordSys (>>> 7.6.18 "Selecting the tool, base and interpolation mode"
Page 46)
KRC_ReadToolData (>>> 7.6.19 "Reading TOOL data" Page 47)
KRC_WriteToolData (>>> 7.6.20 "Writing TOOL data" Page 48)
KRC_ReadBaseData (>>> 7.6.21 "Reading BASE data" Page 49)
KRC_WriteBaseData (>>> 7.6.22 "Writing BASE data" Page 50)
KRC_ReadLoadData (>>> 7.6.23 "Reading the load data" Page 51)
KRC_WriteLoadData (>>> 7.6.24 "Writing load data" Page 52)
KRC_ReadSoftEnd (>>> 7.6.25 "Reading the software limit switches of the robot
axes" Page 54)
KRC_ReadSoftEndEx (>>> 7.6.26 "Reading the software limit switches of the external
axes" Page 55)
 Loading...
Loading...