28 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
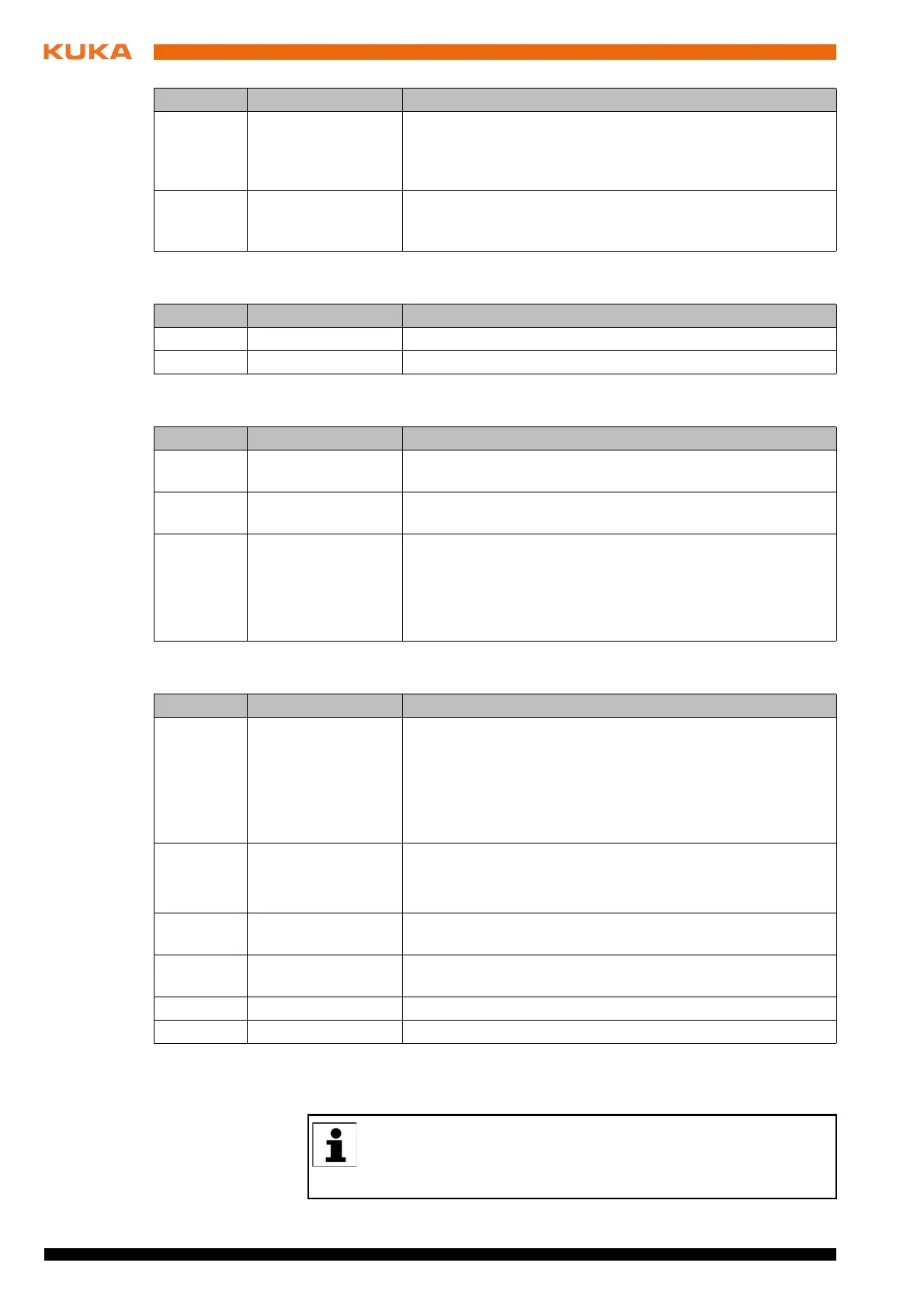
CircType Orientation control for circular motion
OriType Orientation control for the TCP
Status Current state of the mxA interface (function block KRC_ReadMXAStatus)
7.5 Programming tips for KUKA.PLC mxAutomation
1 ABORTING The statement is executed immediately by the robot inter-
preter (main program). First, all active motions and buffered
statements are aborted and the robot is braked to a stand-
still.
2 BUFFERED The statement is buffered. Buffered statements are executed
by the robot interpreter (main program) according to the
FIFO principle.
Value Name Description
Value Name Description
0 BASE Base-related orientation control during a circular motion
1 PATH Path-related orientation control during a circular motion
Value Name Description
0 VAR The orientation of the TCP changes continuously during the
motion.
1 CONSTANT The orientation of the TCP remains constant during the
motion.
2 JOINT The orientation of the TCP changes continuously during the
motion, but not uniformly. This is done by linear transforma-
tion (axis-specific motion) of the wrist axis angles.
Note: This orientation type is not suitable if a specific orienta-
tion must be maintained exactly.
Value Name Description
0 Invalid No function blocks can be processed.
Frequent causes:
Submit interpreter stopped or deselected
I/O error due to incorrect bus configuration
Robot controller not started.
1 Error An mxA error message is active.
The error message must be reset with the function block
KRC_MessageReset.
2 ProgramStopped Robot interpreter is not active (main program has been
stopped or deselected).
3 StandBy Robot interpreter is active and waiting for statements, e.g.
waiting for an input.
4 Executing Robot interpreter is active (main program is being executed).
5 Aborting Robot stopped and all statements aborted.
The MxA_Rockwell_Sample.ACD template supplied on the USB
stick (Template folder) contains all the function blocks and a pro-
gramming example with the fundamental function blocks. It is advis-
able to use this template for creating an mxAutomation robot program.
 Loading...
Loading...