46 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
Outputs
7.6.18 Selecting the tool, base and interpolation mode
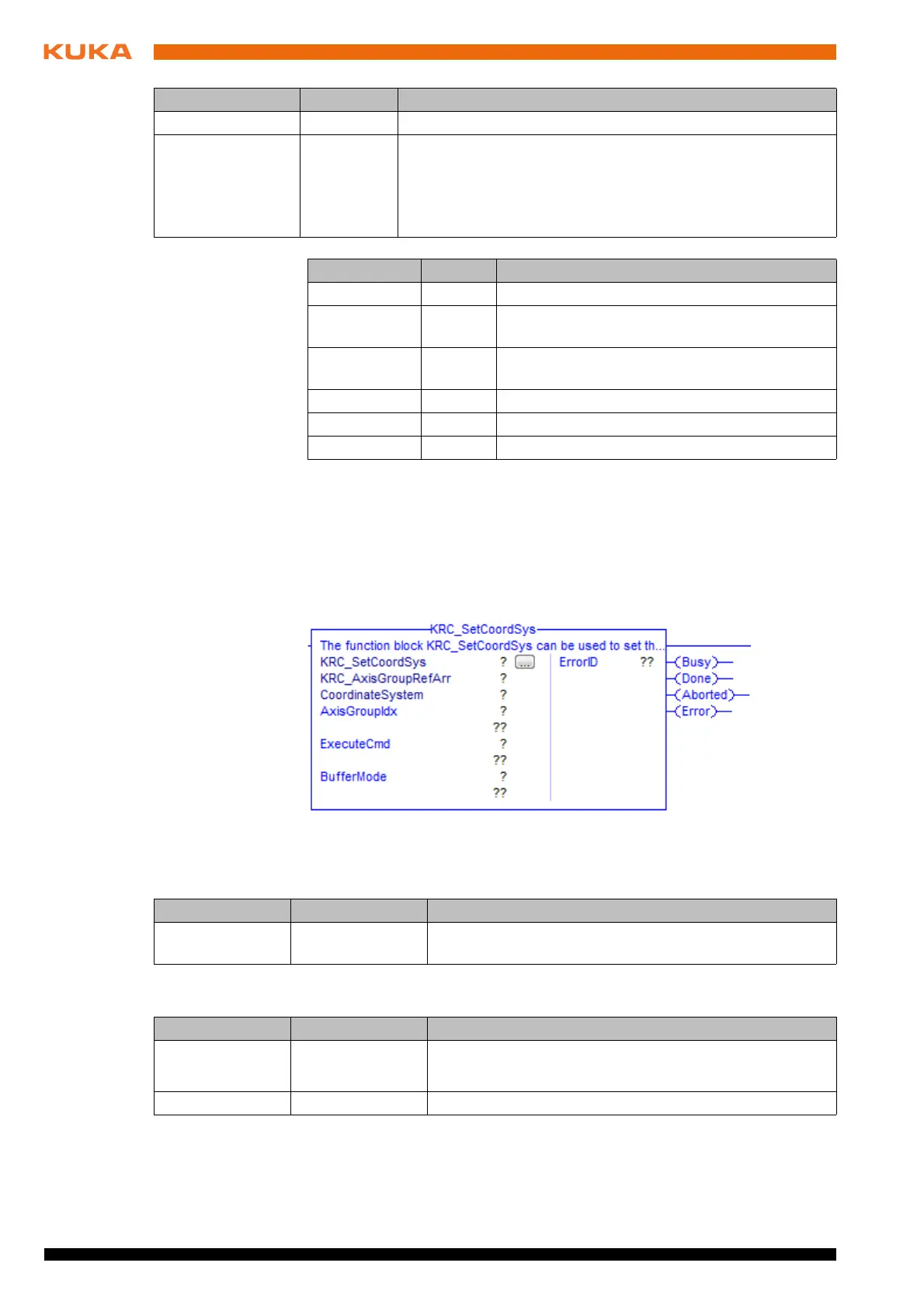
Description The function block KRC_SetCoordSys can be used to set the tool, base and
interpolation mode without having to execute a motion at the same time. This
function is required, for example, to read the current position in different coor-
dinate systems.
Memory
Inputs
Continue BOOL TRUE = poll input in advance run
BufferMode INT Mode in which the statement is executed
1: ABORTING
2: BUFFERED
(>>> "BufferMode" Page 27)
Parameter Type Description
Parameter Type Description
ErrorID DINT Error number
Busy BOOL TRUE = statement is currently being trans-
ferred or has already been transferred
Active BOOL TRUE = statement is currently being executed
(robot is waiting for an input)
Done BOOL TRUE = statement has been executed
Aborted BOOL TRUE = statement has been aborted
Error BOOL TRUE = error in function block
Fig. 7-19: Function block KRC_SetCoordSys
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
CoordinateSys-
tem
COORDSYS Coordinate system to which the specified values refer
(>>> "COORDSYS" Page 26)
AxisGroupIdx INT Index of axis group
 Loading...
Loading...