33 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
Inputs
Outputs
7.6.4 Setting the program override (POV)
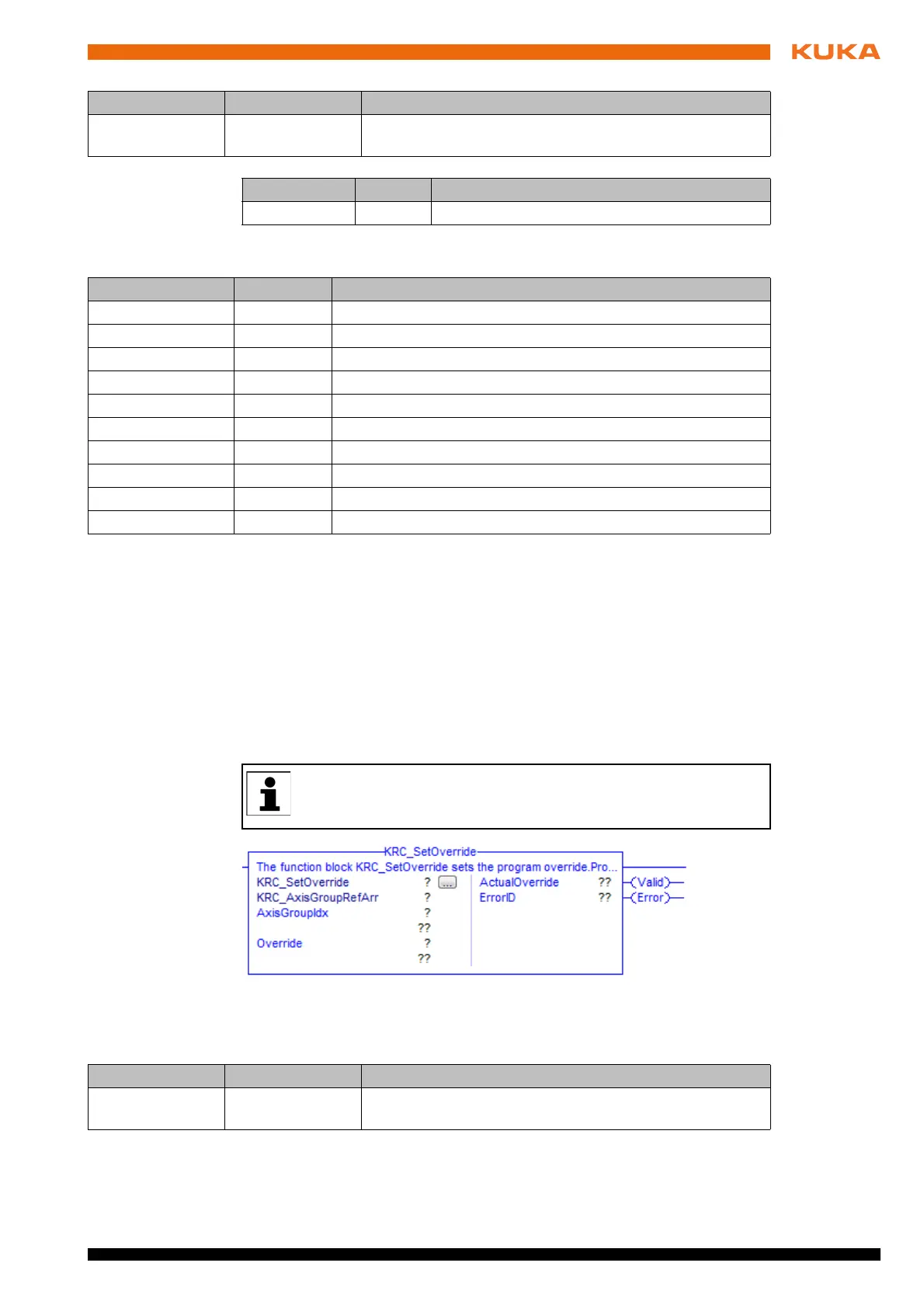
Description The function block KRC_SetOverride sets the program override.
Program override is the velocity of the robot during program execution. The
program override is specified as a percentage of the programmed velocity.
The override setting is transferred to the robot during every PLC cycle. If the
override setting is changed, this change is detected by the robot and applied.
The override is only applied in Automatic External mode so that the override
can be set via the smartPAD in the test modes T1 and T2, e.g. for teaching.
Memory
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisGroupIdx INT Index of axis group
Parameter Type Description
ErrorID DINT Error number
KRC_Serial DINT Serial number of the robot controller
KRC_Major DINT Version identifier of the mxA interface (1st digit)
KRC_Minor DINT Version identifier of the mxA interface (2nd digit)
KRC_Revision DINT Version identifier of the mxA interface (3rd digit)
PLC_Major DINT Version identifier of the PLC library (1st digit)
PLC_Minor DINT Version identifier of the PLC library (2nd digit)
PLC_Revision DINT Version identifier of the PLC library (3rd digit)
Done BOOL TRUE = initialization successfully completed
Error BOOL TRUE = error in function block
The function block may only be instanced once per robot. In the case
of multiple instancing, the signals of the most recently called function
block are output.
Fig. 7-5: Function block KRC_SetOverride
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
 Loading...
Loading...