36 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
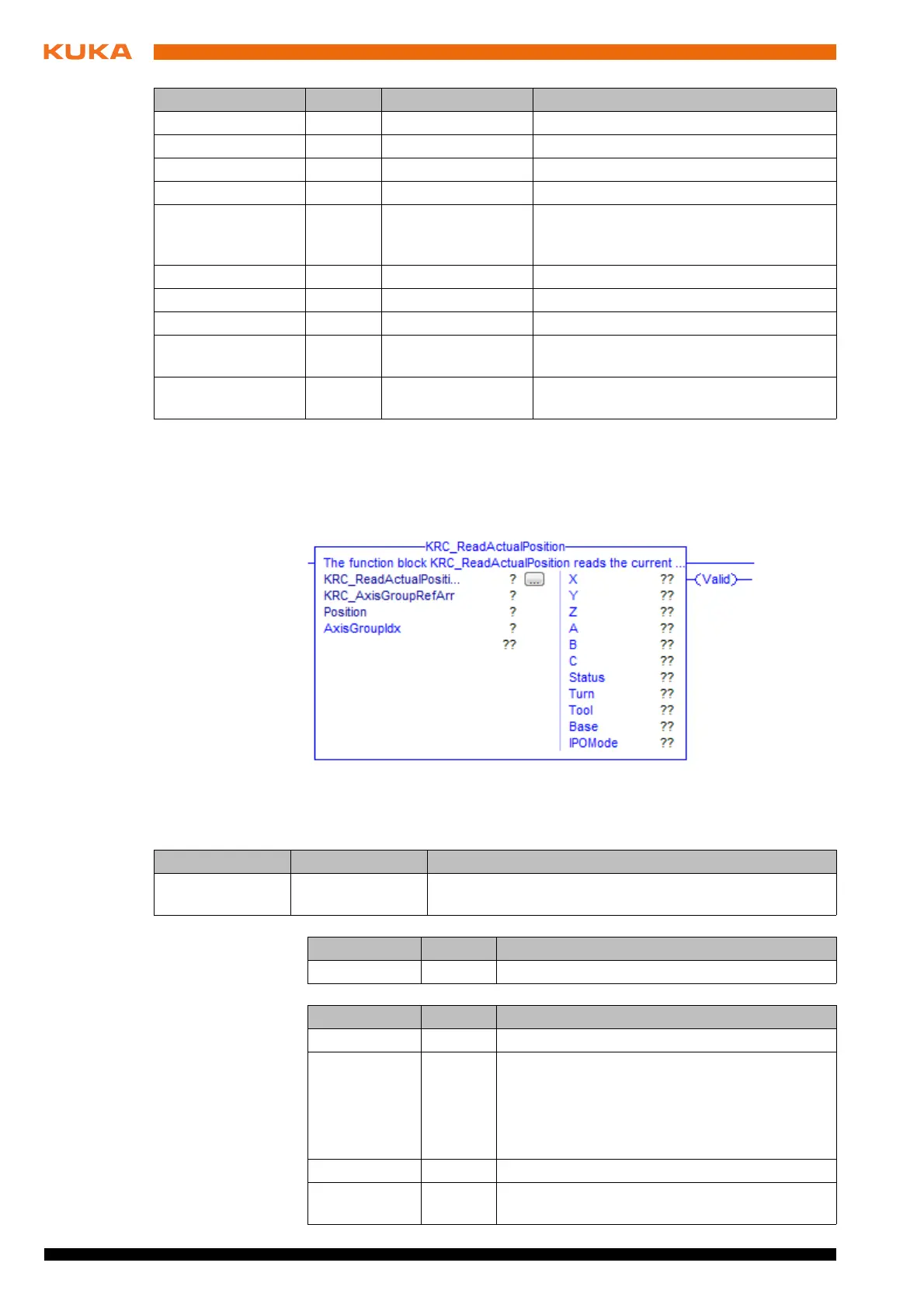
7.6.6 Reading the current robot position
Description The function block KRC_ReadActualPosition reads the current Cartesian ac-
tual position of the robot $POS_ACT. This is updated cyclically.
Memory
Inputs
Outputs
PRO_ACT BOOL $PRO_ACT TRUE = process active at robot level
APPL_RUN BOOL APPL_RUN TRUE = robot program running
PRO_MOVE BOOL $PRO_MOVE TRUE = synchronous robot motion active
ON_PATH BOOL $ON_PATH TRUE = robot on programmed path
NEAR_POSRET BOOL $NEAR_POSRET TRUE = robot near most recently saved
position on the programmed path (after
leaving path)
ROB_STOPPED BOOL $ROB_STOPPED TRUE = robot is at standstill
T1 BOOL $T1 TRUE = operating mode T1 selected
T2 BOOL $T2 TRUE = operating mode T2 selected
AUT BOOL $AUT TRUE = operating mode Automatic
selected
EXT BOOL $EXT TRUE = operating mode Automatic
External selected
Parameter Type Signal name (KRL) Description
Fig. 7-7: Function block KRC_ReadActualPosition
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisGroupIdx INT Index of axis group
Parameter Type Description
Valid BOOL TRUE = data are valid
Position E6POS Current Cartesian actual position $POS_ACT
The data structure E6POS contains all compo-
nents of the Cartesian actual position (= posi-
tion of the TCP relative to the origin of the
BASE coordinate system).
X, Y, Z REAL Current actual position in the X, Y, Z directions
A, B, C REAL Orientation A, B, C in the current actual posi-
tion
 Loading...
Loading...